
Рефераты по международному публичному праву
Рефераты по международному частному праву
Рефераты по международным отношениям
Рефераты по культуре и искусству
Рефераты по менеджменту
Рефераты по металлургии
Рефераты по муниципальному праву
Рефераты по налогообложению
Рефераты по оккультизму и уфологии
Рефераты по педагогике
Рефераты по политологии
Рефераты по праву
Биографии
Рефераты по предпринимательству
Рефераты по психологии
Рефераты по радиоэлектронике
Рефераты по риторике
Рефераты по социологии
Рефераты по статистике
Рефераты по страхованию
Рефераты по строительству
Рефераты по таможенной системе
Сочинения по литературе и русскому языку
Рефераты по теории государства и права
Рефераты по теории организации
Рефераты по теплотехнике
Рефераты по технологии
Рефераты по товароведению
Рефераты по транспорту
Рефераты по трудовому праву
Рефераты по туризму
Рефераты по уголовному праву и процессу
Рефераты по управлению
Курсовая работа: Автоматическая система регулирования температуры
Курсовая работа: Автоматическая система регулирования температуры
Министерство образования РФ
Владимирский государственный университет
Расчетно-пояснительная записка к курсовой работе по дисциплине «Моделирование систем управления»
Автоматическая система регулирования температуры
Выполнил:
ст. гр. УИ-106
Дмитерчук С.Б.
Принял: Малафеев С.И.
Владимир 2009
Содержание:
1. ПРИНЦИП ДЕЙСТВИЯ, ЭЛЕМЕНТЫ, ФУНКЦИОНАЛЬНАЯ И СТРУКТУРНАЯ СХЕМЫ СИСТЕМЫ:
1.1 Описание функциональной схемы устройств
1.2 Описание структурной схемы
1.3 Описание объекта управления. Его статические и динамические характеристики
1.4 Принцип действия измерительного устройства
1.5 Характеристики регулирующего устройства
1.6 Принцип действия и характеристики исполнительного устройства
2. ИССЛЕДОВАНИЕ И МОДЕЛИРОВАНИЕ ЛИНЕЙНОЙ АВТОМАТИЧЕСКОЙ СИСТЕМЫ:
2.1 Нелинейности автоматической системы, их статические характеристики
2.2 Линеаризация системы в рабочей точке
2.3 Передаточные функции линеаризованной системы
2.4 Характеристическое уравнение системы
2.5 Анализ устойчивости линейной модели системы
2.6 Определение показателя колебательности. Построение области устойчивости системы в плоскости параметров регулирующего устройства (Кр, Тр)
2.7 Корневой годограф системы
2.8 Импульсные и переходные характеристики разомкнутой системы относительно задающего и возмущающего воздействий
2.9 Аналитический расчет переходных процессов в замкнутой системе
2.10 Моделирование линеаризованной системы с помощью Matlab
2.11 Выполнить оптимизацию линеаризованной системы с помощью моделирования
2.12 Определить характеристики оптимизированной системы
2.13 Исследовать процессы в системе (для выходного сигнала и ошибки) при действии различных сигналов
2.14 Оценка точности системы. Основные составляющие ошибки
3. ИССЛЕДОВАНИЕ И МОДЕЛИРОВАНИЕ НЕЛИНЕЙНОЙ АВТОМАТИЧЕСКОЙ СИСТЕМЫ:
3.1 Переходные процессы в системе при различных отклонениях от параметров рабочей точки задающего и возмущающего воздействий
3.2 Исследование процессов для выходной переменной и ошибки системы при действии на входе сигналов задания, содержащих гармоническую составляющую
3.3 Статические характеристики нелинейной системы
4. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ИМИТАЦИОННОГО МДЕЛИРОВАНИЯ АВТОМАТИЧЕСКОЙ СИСТЕМЫ:
4.1 Составление программы для имитационного моделирования, используя структурную схему нелинейной автоматической системы
4.2 Используя составленную программу, определить переходные процессы в системе для выходной переменной и ошибки при изменении задающего и возмущающего воздействий для различных рабочих точек
4.3 Статические характеристики системы
4.5 Сравнение результатов моделирования с помощью составленной программы и с помощью типовых программных средств
5. ДОПОЛНИТЕЛЬНОЕ ИССЛЕДОВАНИЕ СИСТЕМЫ:
5.1 Влияние напряжения питающей сети на процессы регулирования температуры
5.2 Изменение свойств системы при использовании вместо ПИ регулятора П-, ПД- и ПИД-регулятора
5.3 Работа системы при использовании релейного двухпозиционного регулятора
ВЫВОДЫ
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. ПРИНЦИП ДЕЙСТВИЯ, ЭЛЕМЕНТЫ, ФУНКЦИОНАЛЬНАЯ И СТРУКТУРНАЯ СХЕМЫ СИСТЕМЫ
1.1 Описание функциональной схемы устройства
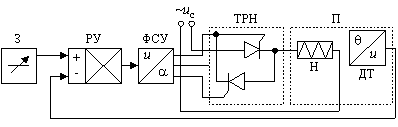
Рис. 1. Функциональная схема автоматической системы регулирования температуры
Общий принцип действия системы автоматического регулирования температуры состоит в том, чтобы поддерживать на требуемом уровне температуру объекта (в нашем случае – печи). Происходит это следующим образом – с датчика температуры (ДТ), который находится в печи (П), текущее значение температуры поступает на регулирующее устройство (РУ), которое на основании полученной информации вырабатывает управляющее воздействие. Это воздействие формируется по алгоритму управления, заложенному в регулятор.
Далее сигнал с РУ поступает на исполнительное устройство, а именно – на тиристорный регулятор напряжения (ТРН), управляемый ФСУ. Задача фазосдвигающего устройства – в соответствии с сигналом регулятора формировать такие углы включения тиристоров, чтобы напряжение, подаваемое на нагреватель, поддерживало температуру на нужном уровне. Установка требуемой температуры осуществляется с помощью задатчика (З).
1.2 Описание структурной схемы
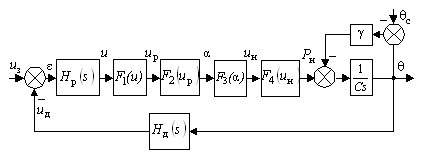
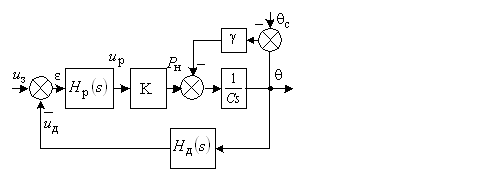
Рис. 2. Структурная схема автоматической системы регулирования температуры
Входным сигналом системы является напряжение Uз, оно сравнивается с напряжением Uд ≈ Θ, которое действует на выходе датчика. Если Uз ≠ Uд, то появляется ошибка ε = Uз – Uд.
Допустим, что Uз > Uд, тогда ε > 0. Далее эта ошибка поступает на вход РУ, где она усиливается. РУ имеет передаточную функцию (ПФ)
![]()
Uр увеличивается, а углы включения тиристоров уменьшаются, т. к.
![]()
Следовательно Uн увеличивается.
![]()
Рн также увеличивается:
![]()
следовательно, температура в печи растет.
Если ε < 0, то температура в печи уменьшается за счет теплообмена.
Как правило, в реальных системах сложно точно разграничить объект управления и исполнительные механизмы, потому что структурная схема является упрощенной моделью устройств и может либо объединять несколько реальных объектов в один блок, либо наоборот разбивать объекты на несколько блоков.
В предложенной схеме можно принять, что:
1) Объектом управления является печь с нагревателем.
2) Исполнительным устройством, которое вырабатывает регулирующее воздействие Uн является тиристорный регулятор напряжения.
3)Измерительное устройство – датчик, который также является элементом главной ОС, вырабатывающим сигнал, находящийся в определенной функциональной зависимости от регулируемой переменной.
1.3 Описание объекта управления. Его статические и динамические характеристики
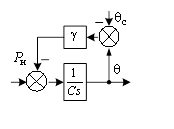
Объект управления представляет собой печь с нагревательным элементом, управление которым осуществляет тиристорный выпрямитель. Тепловое сопротивление изоляции печи осуществляется с помощью бока усиления с коэффициентом γ и сумматоров. С – теплоемкость печи. Ниже представлены характеристики печи, полученные с помощью САПР Matlab.
1.4 Принцип действия измерительного устройства
Передаточная
функция датчика ![]() .
.
В качестве датчика температуры может использоваться термистор.
Термистор — полупроводниковый резистор, электрическое сопротивление которого существенно убывает или возрастает с ростом температуры. Для термистора характерны большой температурный коэффициент сопротивления (ТКС) (в десятки раз превышающий этот коэффициент у металлов), простота устройства, способность работать в различных климатических условиях при значительных механических нагрузках, стабильность характеристик во времени.
Терморезистор изготовляют в виде стержней, трубок, дисков, шайб, бусинок и тонких пластинок преимущественно методами порошковой металлургии; их размеры могут варьироваться в пределах от 1—10 мкм до 1—2 см. Основными параметрами терморезистора являются: номинальное сопротивление, температурный коэффициент сопротивления, интервал рабочих температур, максимально допустимая мощность рассеяния.
Ошибку датчика можно подсчитать следующим способом:
![]() ;
; ![]() , =>
, => ![]() ,
следовательно погрешность датчика составляет 5%.
,
следовательно погрешность датчика составляет 5%.
Получим характеристика датчика, использованного в исследуемой системе:
1.5 Характеристики регулирующего устройства
В данной схеме в качестве регулирующего устройства выступает ПИ-регулятор с передаточной функцией:
![]() или в другой
форме
или в другой
форме ![]() , где
, где
![]()
Характеристики регулирующего устройства:
1.6 Принцип действия и характеристики исполнительного устройства
В исследуемой схеме исполнительным устройством является тиристорный выпрямитель, который подает напряжение на нагреватель в соответствии с управляющим воздействием, вырабатываемым регулятором.
Наиболее экономичным способом управления выпрямленным напряжением является управляемое выпрямление. В управляемых выпрямителях в качестве управляемых вентилей применяются тиристоры. Управление в выпрямителе сводится к управлению моментом отпирания тиристоров.
На управляющий электрод тиристора периодически подаются импульсы напряжения Uу, которые могут сдвигаться во времени по отношению к моменту появления положительной полуволны коллекторного напряжения Uк В результате меняется момент отпирания тиристора, начиная с которого и до конца положительной полуволны коллекторного напряжения тиристор находится в открытом состоянии. Этот сдвиг обозначается и называется углом управления. Такой метод управления называется импульсно-фазовым.
Устройство, обеспечивающее нужный угол открывания тиристоров, называется фазосдвигающим устройством (ФСУ).
Регулировочная характеристика:
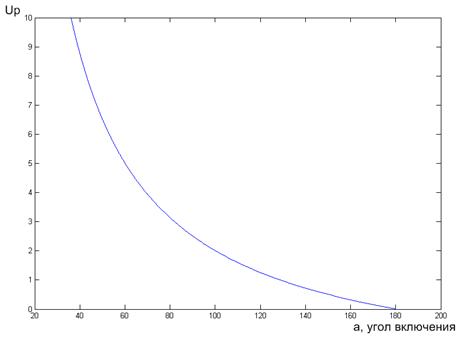
Зависимость угла включения тиристоров от управляющего напряжения
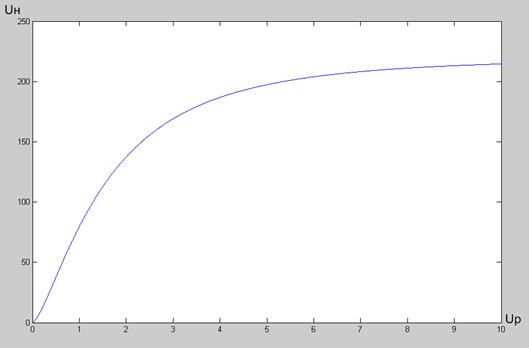
Зависимость действующего значения напряжения Uн от напряжения управления Up
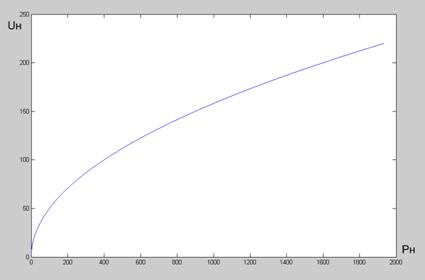
Зависимость мощности Pн, выделяемой в нагревателе от действующего значения напряжения Uн
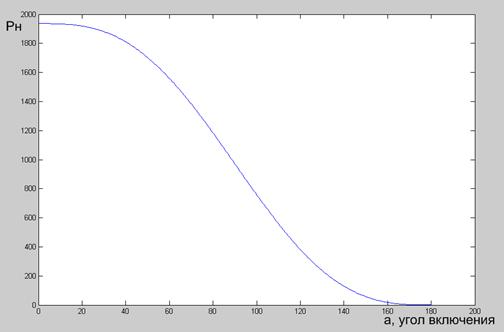
Зависимость мощности Pн, выделяемой в нагревателе от угла проводимости тиристоров
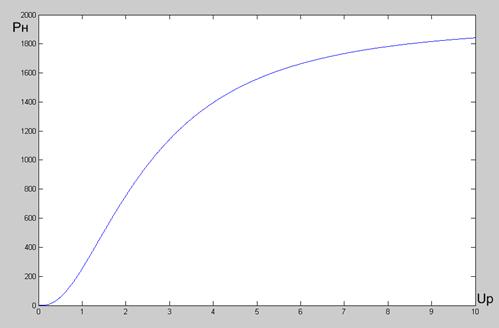
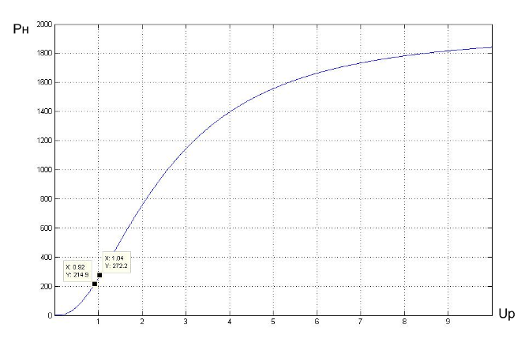
Зависимость мощности Pн, выделяемой в нагревателе от управляющего напряжения Uр
2. ИССЛЕДОВАНИЕ И МОДЕЛИРОВАНИЕ ЛИНЕЙНОЙ АВТОМАТИЧЕСКОЙ СИСТЕМЫ
2.1 Нелинейности автоматической системы, их статические характеристики
2.1.1. F1(u) – нелинейность, отражающая ограничение выходного сигнала регулирующего устройства;
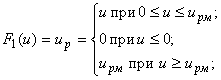
uр – выходной сигнал регулирующего устройства;
uрм – максимальное значение выходного сигнала регулирующего устройства; uрм = 10 В
Статическая характеристика нелинейности имеет вид:
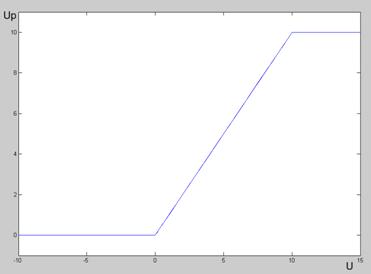
Рис.3.Статическая характеристика нелинейности F1(u)
2.1.2 F2(uр) – нелинейная характеристика фазосдвигающего устройства (ФСУ);
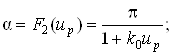
k0 – коэффициент пропорциональности;
Статическая характеристика нелинейности имеет вид:
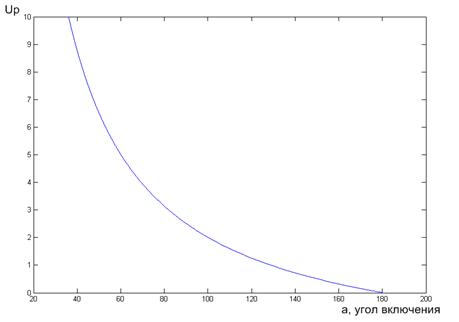
Рис.4.Статическая характеристика нелинейности F2(u)
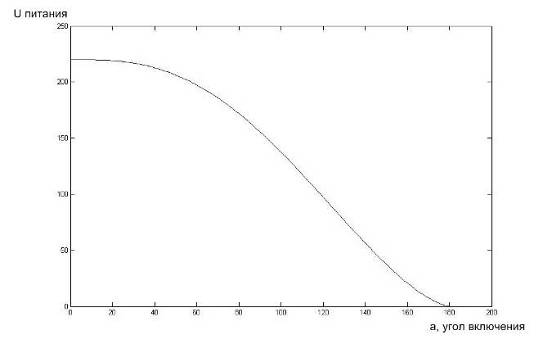
2.1.3. F3(α) – зависимость действующего значения выходного напряжения тиристорного регулятора от угла включения тиристоров;
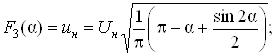
Uc=220B;
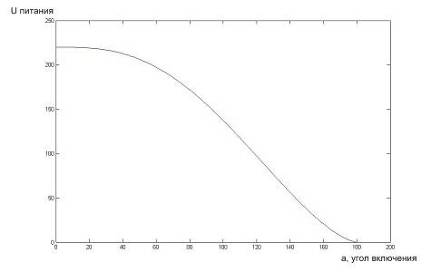
Рис.5. Статическая характеристика нелинейности F3(u)
2.1.4. F4(uн) – нелинейная зависимость мощности электротеплового преобразователя (нагревателя) от напряжения;
![]()
Pн – мощность;
Rн – активное сопротивление нагревателя;
C – теплоемкость печи;
γ – коэффициент, моделирующий тепловое сопротивление теплоизоляции;
θ – температура;
θс- температура окружающей среды;
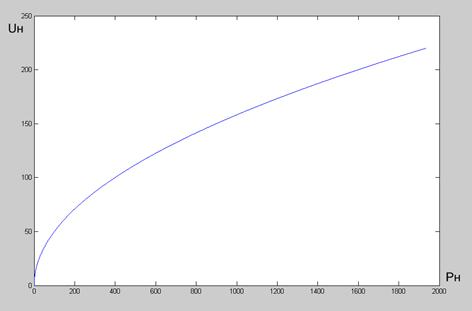
Рис. 6. Статическая характеристика нелинейности F4(u)
2.2 Линеаризация системы в рабочей точке
В нормально функционирующей САУ значение регулируемой и всех промежуточных величин незначительно отличается от требуемых. В пределах малых отклонений все нелинейные зависимости между величинами, входящими уравнение динамики, могут быть приближенно представлены отрезками прямых линий.
Для линеаризации системы воспользуемся общей статической характеристикой всех нелинейностей, а именно зависимостью мощности нагревателя от напряжения управления (нелинейностью типа Ограничение можно пренебречь, так как предполагается работа системы в рабочей точке). С помощью расчетов были установлены значения всех величин в рабочей точке системы, для данной зависимости это будут Pн=275 Дж и Up=1.046 В.
Суть линеаризации состоит в том, чтобы заменить нелинейную характеристику блоков системы прямой линией в окрестностях рабочей точки. Предполагая работу системы при малых отклонениях, можно пренебречь постоянной составляющей и заменить нелинейность линией типа y=k*x.
Т.к. для нашего случаю рабочая точка находится на линейном участке для линеаризации достаточно выбрать две координаты возле рабочей точки и найти уравнение прямой, проходящей через эти две точки. В итоге получаем Pн=476.19*Up.
Изобразим линию в одной системе координат с нелинейной характеристикой:
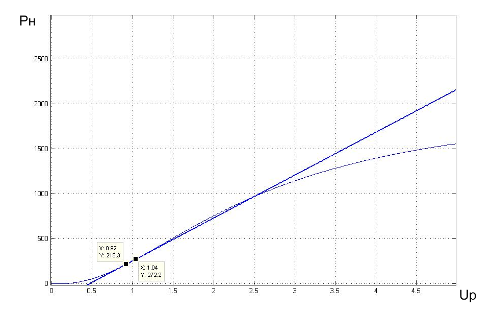
Таким образом мы заменяем нелинейные блоки системы F2, F3, F4 одним пропорциональным звеном с K=476.19. Таким образом структурная схема системы существенно упростилась:
2.3 Передаточные функции линеаризованной системы
2.3.1 П.ф. разомкнутой системы по выходной переменной относительно сигнала:
![]()
2.3.2. П.ф. замкнутой системы по выходной переменной относительно задающего и возмущающего воздействий:
![]() ;
;
 ;
;
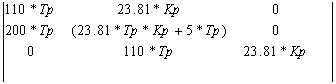
2.4 Характеристическое уравнение системы:
![]()
Характеристический полином:
![]()
![]()
![]() ;
; ![]() ;
; ![]() ;
;
![]() .
.
2.5 Анализ устойчивости линейной модели системы
По передаточной функции замкнутой системы можно судить о том, что система структурно устойчива (т.е. ее нельзя вывести из устойчивости, увеличивая общий коэффициент передачи). Объясняется это тем, что порядок п.ф. получается n=2, следовательно фазовый сдвиг не может превысить 180º без включения звена чистого запаздывания.
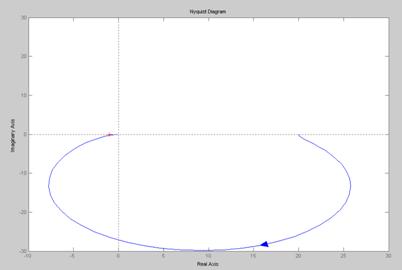
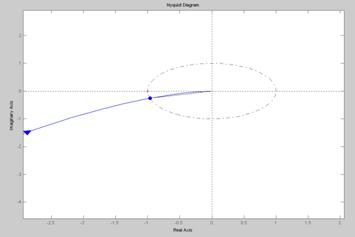
(Увеличенный масштаб)
![]() Очевидно,
что нет смысла определять устойчивость системы другими методами и искать запасы
по амплитуде и фазе.
Очевидно,
что нет смысла определять устойчивость системы другими методами и искать запасы
по амплитуде и фазе.
2.6 Определение показателя колебательности. Построение области устойчивости системы в плоскости параметров регулирующего устройства (Кр, Тр)
2.6.1 Показатель колебательности
Определяем эту величину Ммакс по формуле
P2+Q2=M2[(1+P)2+Q2], где
P- действительная часть ПФ разомкнутой системы
Q- мнимая часть ПФ разомкнутой системы.
Тогда получаем,
что при ω=0 значение АЧХ максимально. Значит получаем М2=104/101=1,0297;
тогда М=![]()
2.6.2 Область устойчивости системы в области параметров ПИ регулятора.
Характеристический полином системы:
![]()
Нас интересуют переменные Tp и Кр, запишем в виде:
![]()
Определим условие устойчивости по критерию гурвица:
Δn=![]()
![]()
 =0
=0
Получим:
![]()
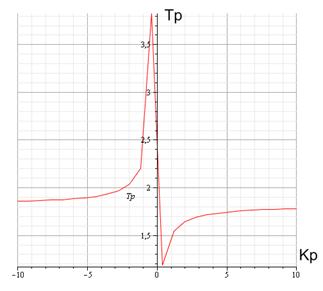
Решив в Maple уравнение относительно Tp получим выражение для построений области устойчивости:

![]()
Построим график этой зависимости:
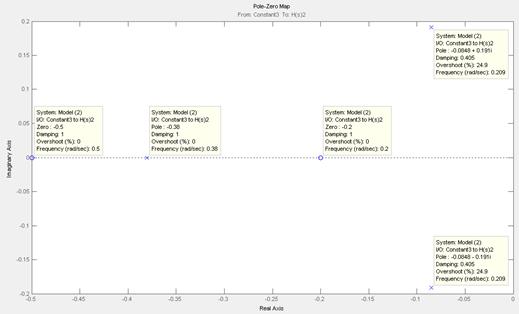
2.7 Корневой годограф системы
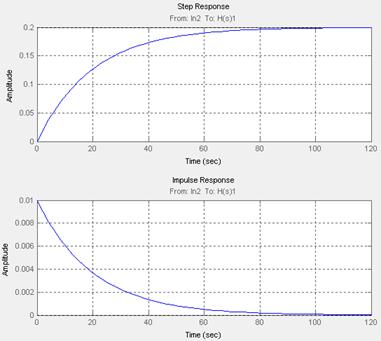
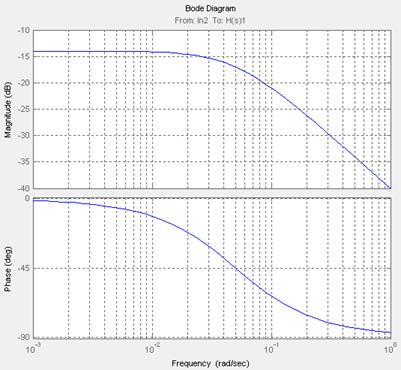
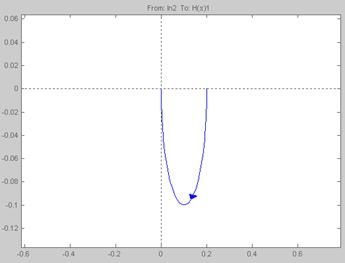
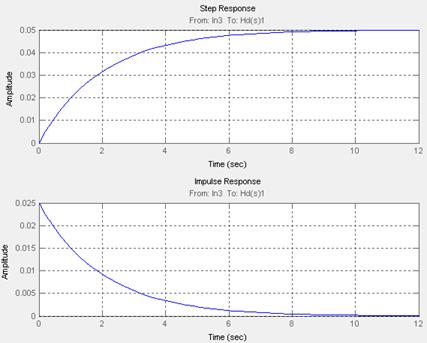
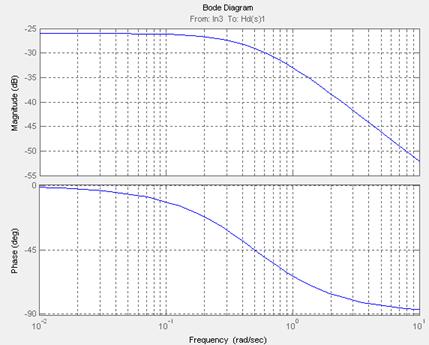
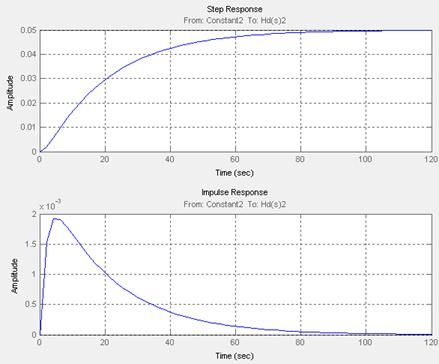
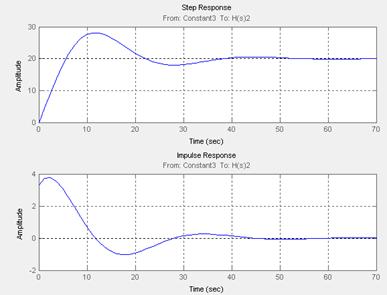
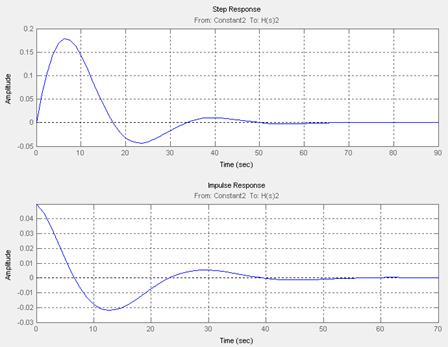
2.8 Импульсные и переходные характеристики разомкнутой системы относительно задающего и возмущающего воздействий
Импульсная и переходная характеристики относительно задающего воздействия
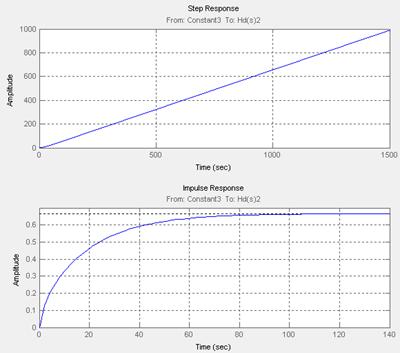
Импульсная и переходная характеристики относительно возмущающего воздействия
2.9 Аналитический расчет переходных процессов в замкнутой системе при ступенчатых изменениях задающего и возмущающего воздействий
Амплитудные значения сигналов принять равными 10% от соответствующих значений в рабочей точке, т.е. u3=0.4 В и Qc=2.5 ºC
Для получения переходной характеристики необходимо записать п.ф. замкнутой системы (по задающему или возмущающему воздействию), умножить на a/s, где а – амплитуда ступенчатой функции. Затем нужно осуществить обратное преобразование Лапласа полученного выражения и, получив зависимость h(t), построить график переходного процесса.
Для задающего значения аналитическая зависимость имеет вид:
автоматический регулирование температура линеаризованный matlab

Для возмущающего значения аналитическая зависимость имеет вид:

2.10 Выполнить моделирование линеаризованный системы с помощью Matlab
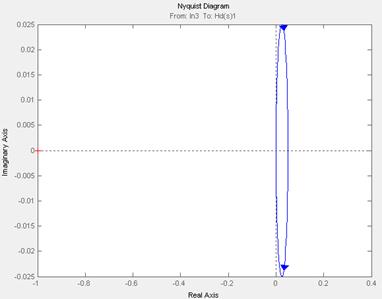
Определить импульсные и переходные характеристики при изменении возмущающего и задающего значений. Определить КЧХ разомкнутой системы
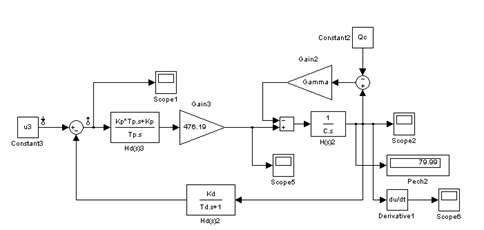
Схема системы, собранная в Simulink:
Характеристики системы.
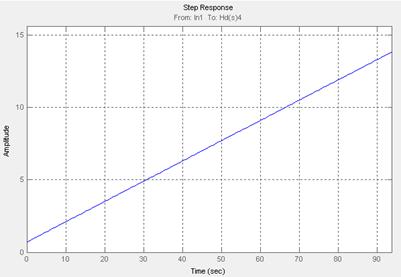
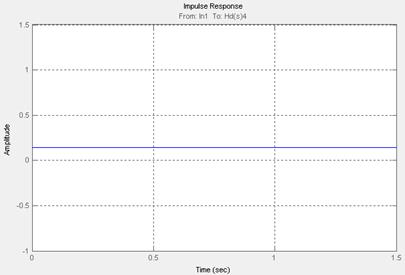
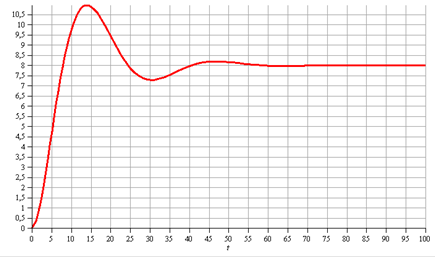
Импульсная и переходная характеристики относительно задающего воздействия
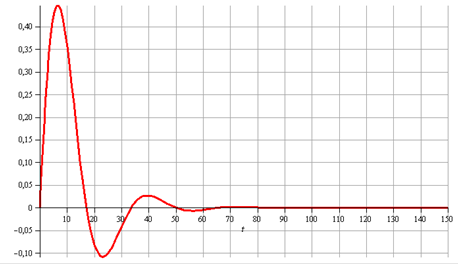
Импульсная и переходная характеристики относительно возмущающего воздействия
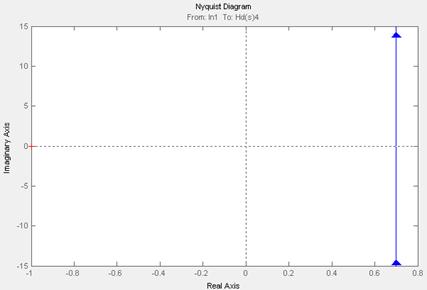
КЧХ разомкнутой системы

2.11 Выполнить оптимизацию линеаризованной системы с помощью моделирования
Определить параметры регулирующего устройства, обеспечивающие минимум интегральной срендеквадратичной ошибки
Оптимизацию проведем с помощью САПР VisSim.
Схема для оптимизации параметров ПИ-регулятора
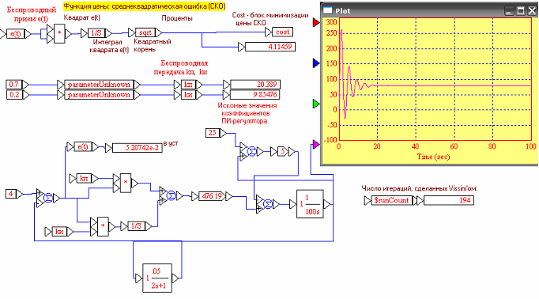
На схеме представлены итоговые значения параметров Kp=20.39, Tp=9.85, а также график переходного процесса в системе при рассчитанных параметрах. Алгоритм завершил оптимизацию за 194 итерации.
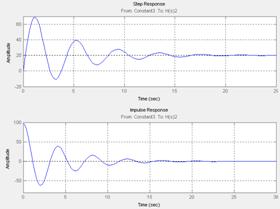
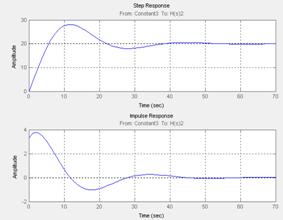
2.12 Определить для оптимизированной системы ЛЧХ, КЧХ, импульсную и переходную характеристики, переходные процессы в замкнутой системе при ступенчатых изменениях сигнала задания и возмущения
Определить запасы устойчивости по амплитуде и фазе. Построить Корневой годограф системы. Сравнить характеристики с исходной системой.
Оптимизированная Неоптимизированная
Импульсная и переходная хар-ки
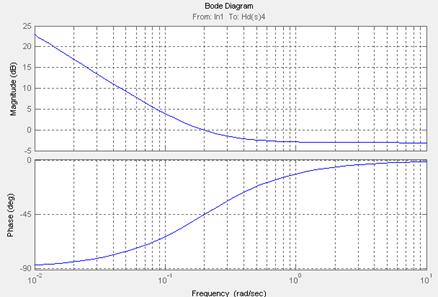
ЛАФЧХ
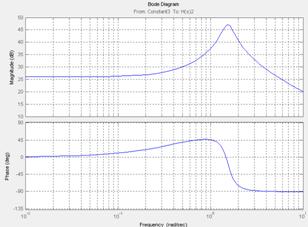
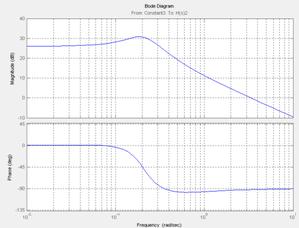
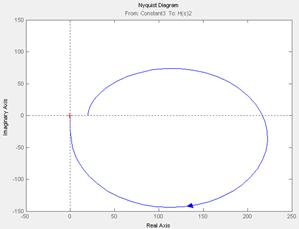
КЧХ
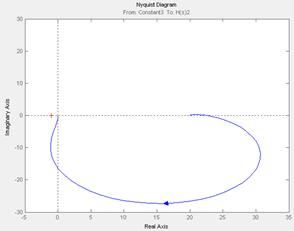
Запас устойчивости по амплитуде и фазе:
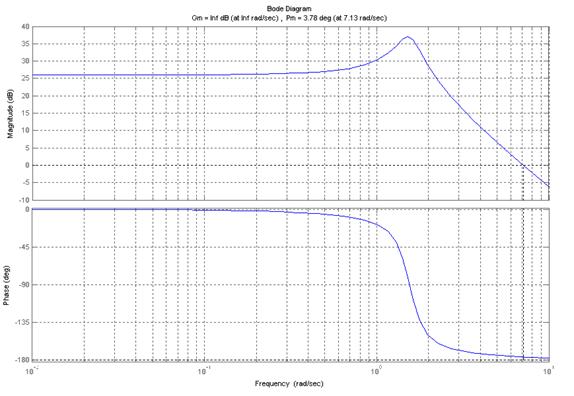
Т.о. запас по фазе Gm=inf, запас по фазе Pm=3.78 град.
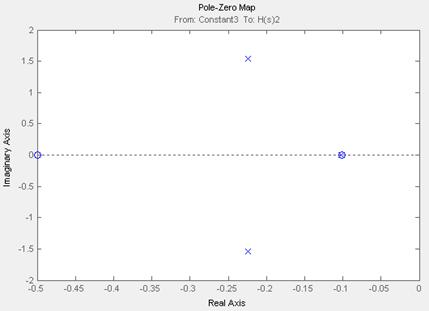
Корневой годограф системы
2.1. Исследовать процессы в системе (для выходного сигнала и ошибки) при действии на входе следующих сигналов
Линейный изменяющийся сигнал uз(t) = 0,05×uз0t, где uз0 - сигнал задания, соответствующий рабочей точке.
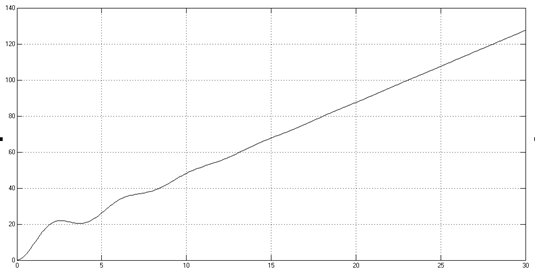
Частота среза схемы: wс=2.97 рад/с
Гармонические сигналы
uз(t) = 0,2uз0sinwсt
uз(t) = 0,2uз0sin(0.1wсt)
uз(t) = 0,2uз0sin(10wсt)
Случайный сигнал типа «белый шум» с дисперсией D=0.1* (uз0^2)
2.14 Оценка точности системы. Основные составляющие ошибки
Основные составляющие ошибки:
E=Eв+Ез+Ед+Ен
Где Е – полная ошибка системы; Ев – ошибка по возмущающему воздействию; Ез – ошибка по задающему воздействию; Ед – ошибка датчика или чувствительного элемента; Ен – параметрическая ошибка.
Ошибка по заданию:
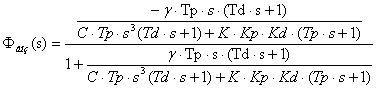
Фз(s)=![]()
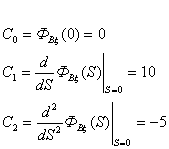
Ез=0Uз+10Uз’- 5Uз”=0
Ошибка по возмущению:
Фεв=![]() ;
;
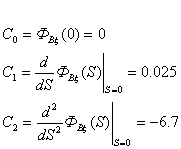
Eв=0Q+0.025Q’- 6,7Q²=0
Таким образом, ошибка в системе сводится лишь к ошибке датчика.
У типовых резисторов точность измерения составляет ±0.02ºС при диапазоне измеряемых температур до -45..400ºС.
В нашем случае Ед=0.05
3. ИССЛЕДОВАНИЕ И МОДЕЛИРОВАНИЕ НЕЛИНЕЙНОЙ АВТОМАТИЧЕСКОЙ СИСТЕМЫ
3.1 Переходные процессы в системе при различных отклонениях от параметров рабочей точки задающего и возмущающего воздействий
Схема для проведения исследования в Matlab
Uз=4В
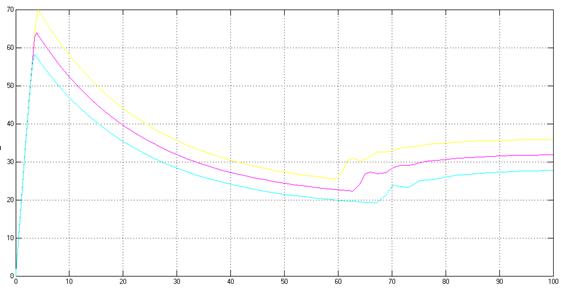
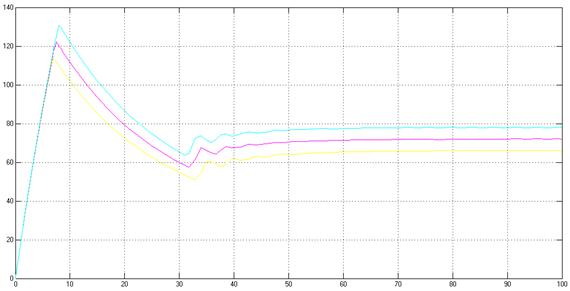
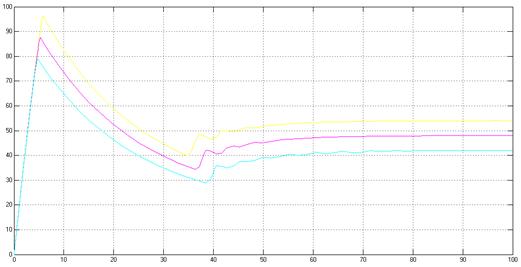
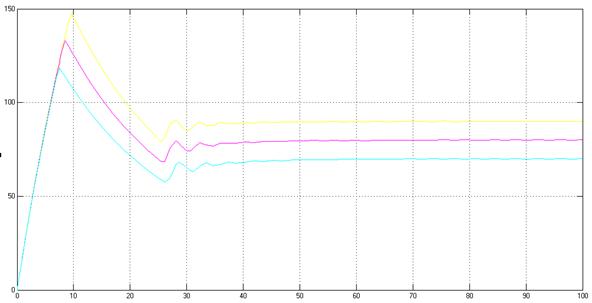
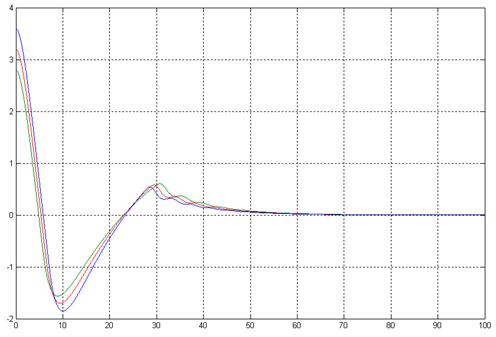
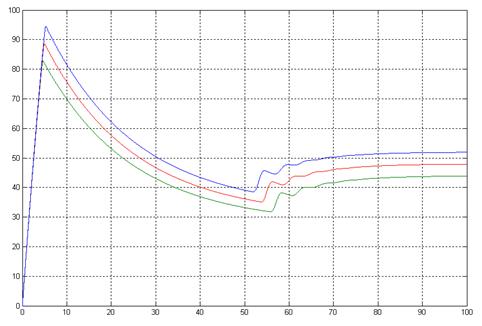
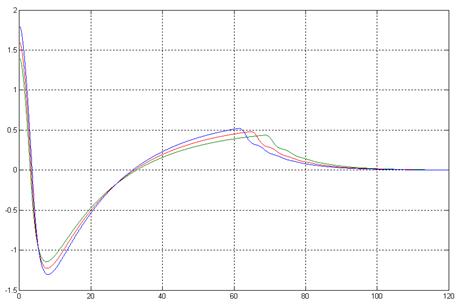
Переходные процессы для выходной переменной (+10%,+20%,+30%)
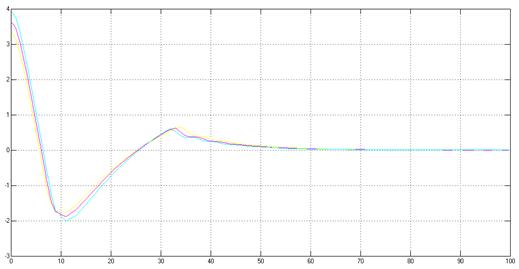
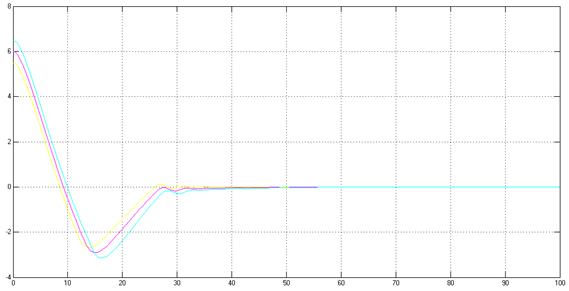
Переходные процессы для ошибки (+10%,+20%,+30%)
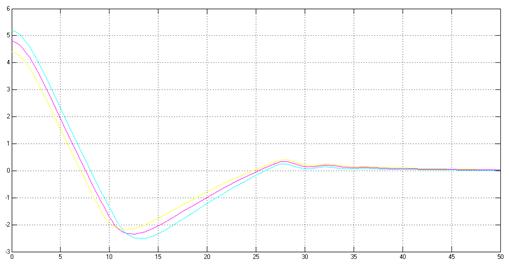
Переходные процессы для выходной переменной (-10%,-20%,-30%)
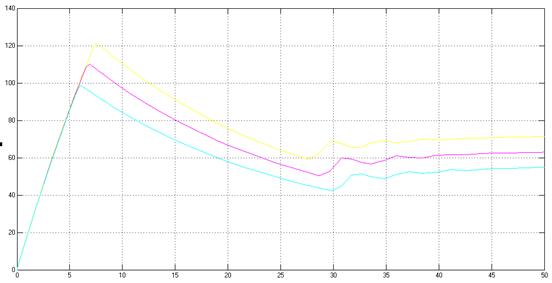
Переходные процессы для ошибки (-10%,-20%,-30%)
Uз=2В
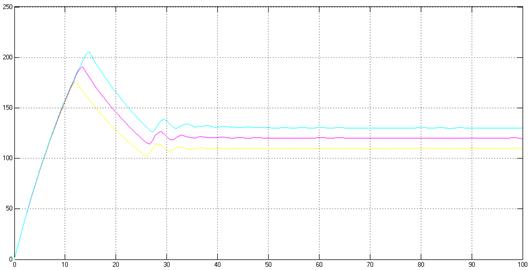
Переходные процессы для выходной переменной (+10%,+20%,+30%)
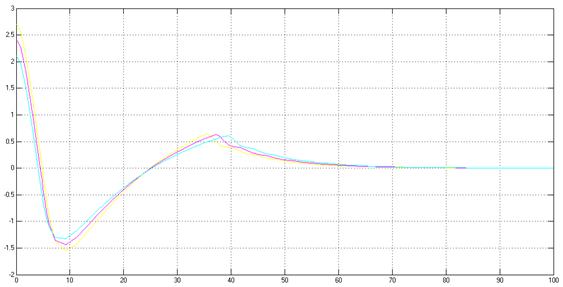
Переходные процессы для ошибки (+10%,+20%,+30%)
Переходные процессы для выходной переменной (-10%,-20%,-30%)
Переходные процессы для ошибки (-10%,-20%,-30%)
Uз=3В
Переходные процессы для выходной переменной (+10%,+20%,+30%)
Переходные процессы для ошибки (+10%,+20%,+30%)
Переходные процессы для выходной переменной (-10%,-20%,-30%)
Переходные процессы для ошибки (-10%,-20%,-30%)
Uз=5В
Переходные процессы для выходной переменной (+10%,+20%,+30%)
Переходные процессы для ошибки (+10%,+20%,+30%)
Переходные процессы для выходной переменной (-10%,-20%,-30%)
Переходные процессы для ошибки (-10%,-20%,-30%)
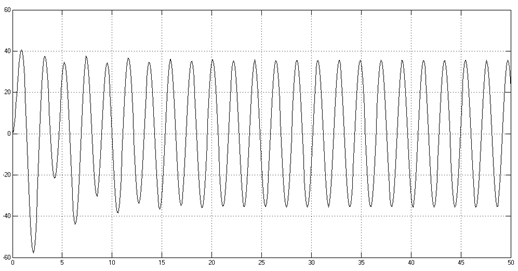
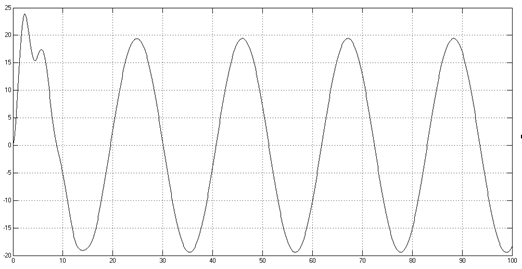
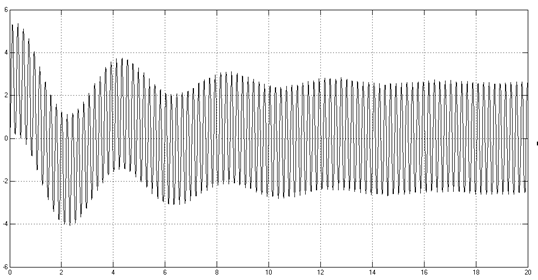
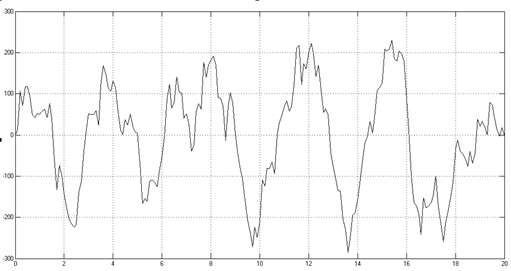
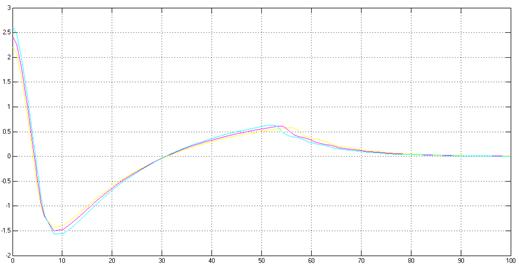
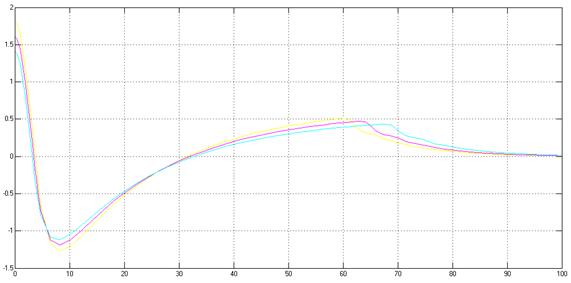
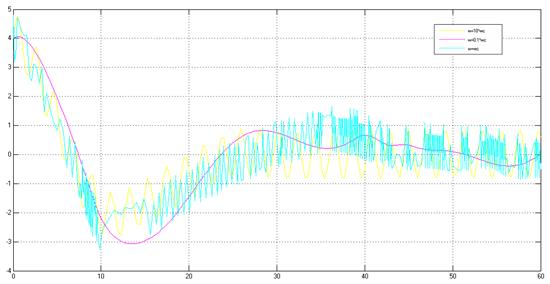
3.2 Исследование процессов для выходной переменной и ошибки системы при действии на входе сигналов задания, содержащих гармоническую составляющую
Для выходной переменной
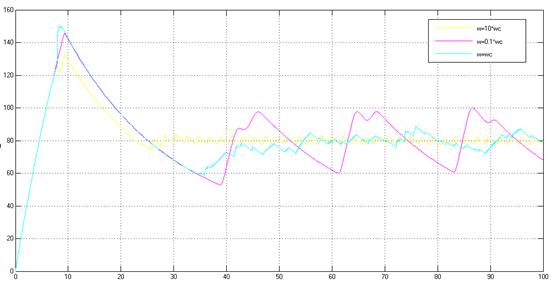
Для ошибки
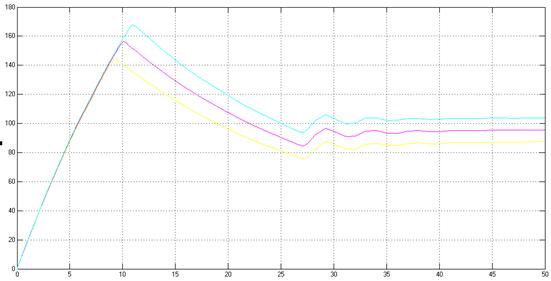
3.3 Статические характеристики нелинейной системы
Зависимости выходной переменной от сигнала задания при трех значениях возмущающего воздействия:
Qc=25ºСQc=5ºС
Qc=50ºС
Зависимости выходной переменной от возмущающего воздействия при трех значениях задающего воздействия:
Uз=2ВUз=4В
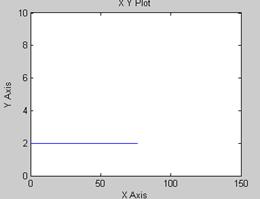
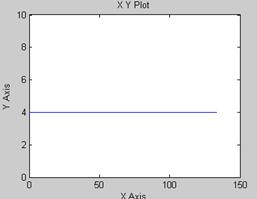
Uз=6В
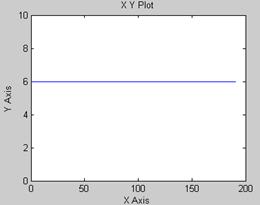
В системе применяется астатический регулятор, поэтому статические характеристики без наклона. Возмущения не влияют на установившееся значение выходной величины, статическая ошибка равна нулю.
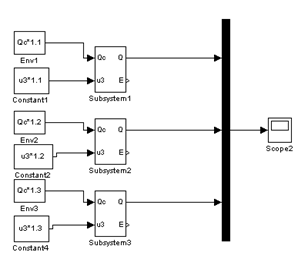
4. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ИМИТАЦИОННОГО МДЕЛИРОВАНИЯ АВТОМАТИЧЕСКОЙ СИСТЕМЫ
4.1 Составление программы для имитационного моделирования, используя структурную схему нелинейной автоматической системы
Листинг программы в Matlab:
clc;
clear;
%Параметыр моделирвоания
dt=0.001;
time=0:dt:100;
%Параметры системы управления
% Пи-регулятор
%------
Kp=20.39;
Tp=10;
%-----
U0=4; %Температура задания
%-----
Upm=10; %ограничение с Пи регулятора
%-----
K0=0.4;
Uc=220;% действующее напряжение сети
C=100;
Rn=25; % сопротивление нагревателя
Tc=25; %температура окружающей среды
gamma=5;
%Параметры датчика тока
%-----
Kd=0.05;
Td=2;
%-----
%Инициализация
err=zeros(1,numel(time));
d_err=zeros(1,numel(time));
U=zeros(1,numel(time));
Up=zeros(1,numel(time));
alpha=zeros(1,numel(time));
Un=zeros(1,numel(time));
Pn=zeros(1,numel(time));
err1=zeros(1,numel(time));
T=zeros(1,numel(time));
Ud=zeros(1,numel(time));
%Начальные условия
%--------------------------
err(1)=U0;
d_err(1)=0;
U(1)=Kp*err(1);
if (U(1)>=10)
Up(1)=10;
end;
alpha(1)=pi/(1+K0*Up(1));
Un(1)=(((pi-alpha(1)+(sin(2*alpha(1))/2))/pi)^0.5)*Uc;
Pn(1)=(Un(1))^2/Rn;
err1(1)=Pn(1)-((T(1)-Tc)*gamma);
T(1)=0; %начальная температура объекта
Ud(1)=0;
%-------------------------
for k=2:1:numel(time)
err(k)=U0-Ud(k-1);
d_err(k)=(err(k)-err(k-1))/dt;
U(k)=U(k-1)+((dt/Tp)*(Kp*Tp*d_err(k-1)+Kp*err(k-1)));
if (U(1)>10)
Up(1)=10;
else
Up(1)=U(1);
end;
if (U(k)<0)
Up(k)=0;
else
Up(k)=U(k);
end;
alpha(k)=pi/(1+K0*Up(k));
Un(k)=(((pi-alpha(k)+(sin(2*alpha(k))/2))/pi)^0.5)*Uc;
Pn(k)=(Un(k))^2/Rn;
err1(k)=Pn(k)-((T(k-1)-Tc)*gamma);
T(k)=T(k-1)+(dt*err1(k-1)/C);
Ud(k)= Ud(k-1)+((Kd*T(k-1)-Ud(k-1))*(dt/Td));
end;
plot(time,T);
grid on;
figure;
plot(time,err);
grid on;
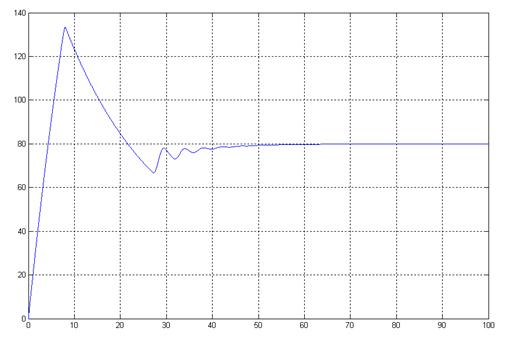
Результаты выполнения программы:
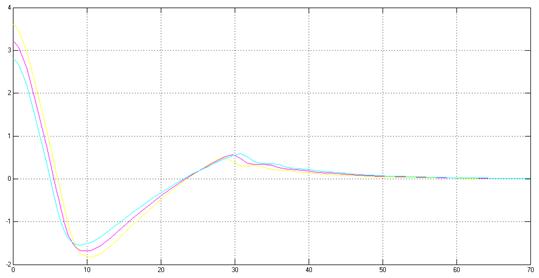
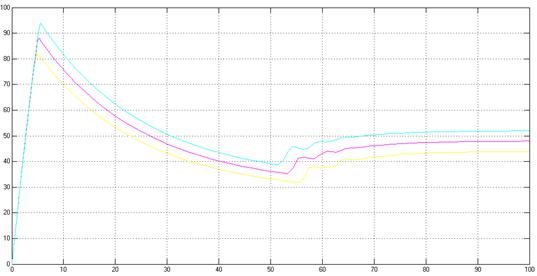
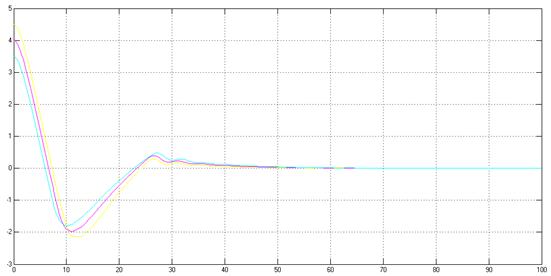
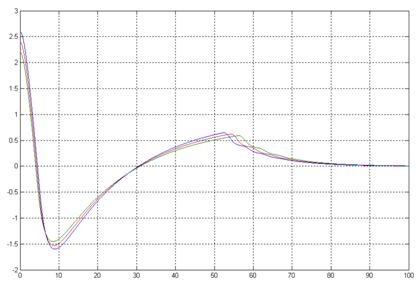
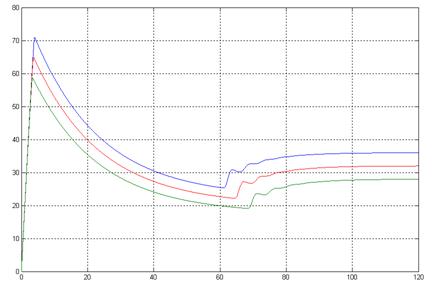
Переходный процесс относительно ошибки
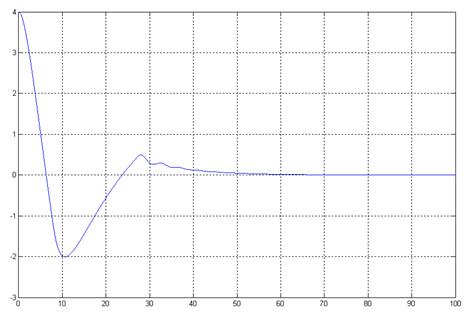
Переходный процесс относительно выходной переменной
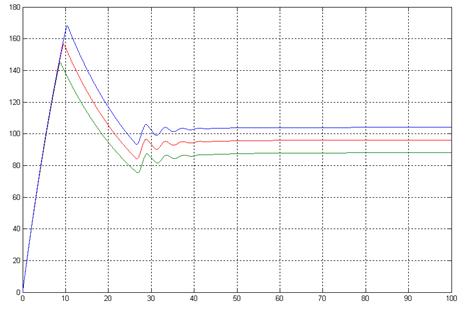
4.2 Используя составленную программу, определить переходные процессы в системе для выходной переменной и ошибки при изменении задающего и возмущающего воздействий для различных рабочих точек
Uз=4В
Переходные процессы для выходной переменной (+10%,+20%,+30%)
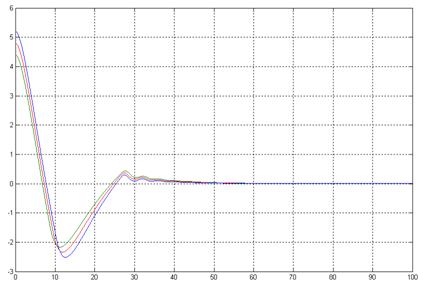
Переходные процессы для ошибки (+10%,+20%,+30%)
Переходные процессы для выходной переменной (-10%,-20%,-30%)
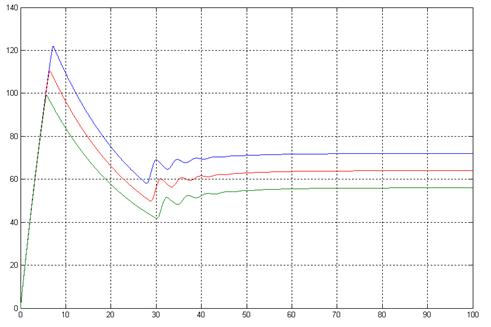
Переходные процессы для ошибки (-10%,-20%,-30%)
Uз=2В
Переходные процессы для выходной переменной (+10%,+20%,+30%)
Переходные процессы для ошибки (+10%,+20%,+30%)
Переходные процессы для выходной переменной (-10%,-20%,-30%)
Переходные процессы для ошибки (-10%,-20%,-30%)
4.3 Статические характеристики системы
Зависимости выходной переменной от возмущающего воздействия при трех значениях задающего воздействия:
Uз=2В Uз=4В
Uз=6В
4.5 Сравнение результатов моделирования с помощью составленной программы и с помощью типовых программных средств
При сравнении переходных процессов по ошибке и возмущающему воздействию, а также статических характеристик системы, полученных с помощью написанной программы и имитационной среды Simulink, можно сделать вывод, очевидно, что графики практически полностью совпадают. Небольшие различия обусловлены лишь различным шагом расчетов.
5. ДОПОЛНИТЕЛЬНОЕ ИССЛЕДОВАНИЕ СИСТЕМЫ
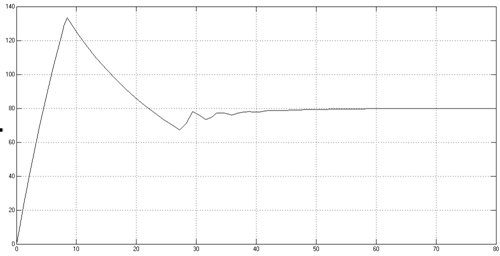
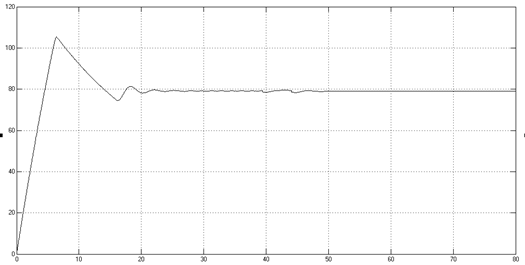
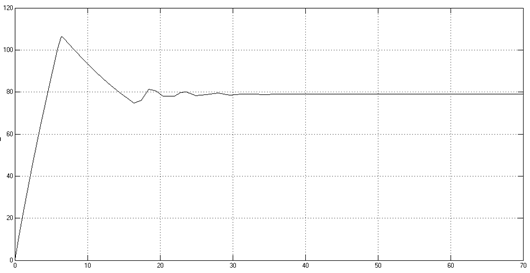
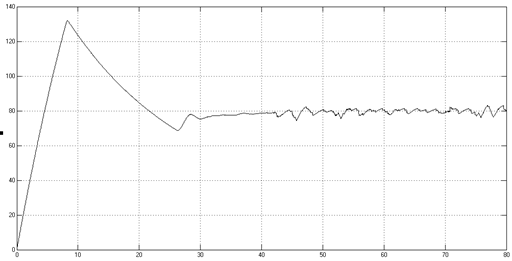
5.1 Влияние напряжения питающей сети на процессы регулирования температуры
Рассмотрим переходные процессы при одном и том же напряжении задания 4В и температуре окружающей среды 25С:
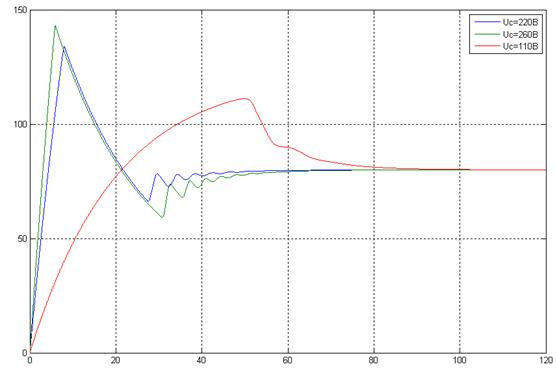
Как видно по переходному процессу, при увеличении напряжения питающей сети увеличивается перерегулирование, инерционность увеличивается незначительно. При уменьшении напряжения питания в 2 раза (например, отказ одного тиристора) перерегулирование резко снижается, но сильно увеличивается время регулирования.
5.2 Изменение свойств системы при использовании вместо ПИ регулятора П-, ПД- и ПИД-регулятора
ПИ-регуляор(исходный):
ПД-регулятор (Kp=20.39, Kd=2):
Применение ПД-регулятора позволило уменьшить величину перерегулирования и значительно сократить время регулирования, однако появилась установившаяся ошибка, для данного задания равная 1ºС.
П-регулятор (Кр=20.39):
Применение данного регулятора немного увеличило перерегулирование, однако время регулирования уменьшилось, даже по сравнению с ПД-регулятором.
ПИД-регулятор (Kp=20.39, Kи=10; Kd=2):
ПИД-регулятор немного уменьшил перерегулирование, при этом время регулирования осталось прежним и появился большой разброс регулируемой величины в установившемся режиме.
5.3 Работа системы при использовании релейного двухпозиционного регулятора
Двухпозиционное реле с гистерезисом (ширина гистерезиса -0.01,0.01, высокий уровень С=1.5, низкий уровень = 0) :
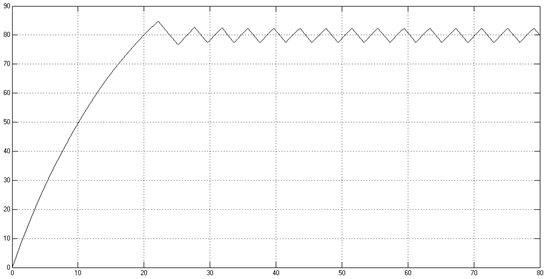
Применение данного регулятора допустимо в том случае, если допустимо отклонение регулируемой величины в довольно широком диапазоне. Данный регулятор обеспечивает приемлемое время регулирования, при большой амплитуде автоколебаний, что компенсируется простотой изготовления такого вида регуляторов.
ВЫВОДЫ
Автоматическая система регулирования температуры при данных параметрах устойчива. Качество процессов регулирования в системе можно увеличить путем изменения параметров системы (в частности параметры Кр, Тр), их оптимизации. Например, при уменьшении общего коэффициента передачи системы уменьшается амплитудное значение сигнала на выходе (выброс) и уменьшается перерегулирование. Так же есть возможность управлять временем установления выходной величины на требуемый уровень
В ходе выполнения курсовой работы были получены статические и динамические характеристики системы регулирования, произведена оптимизация параметров регулятора. Также проводилось исследования работы системы при различных возмущающих воздействиях, задающего воздействия и при влиянии других параметров ( напряжение питания сети, параметров регулятора). Проанализирована работа системы при использовании вместо ПИ-регулятора других типов (П, ПД, ПИД), а также двухпозиционного реле.
Моделирование системы позволяет достаточно точно определять свойства системы, ее поведение при различных значениях входного и возмущающего воздействия и с помощью оптимизации найти наилучшие значения ее параметров.
Список использованной литературы:
1. Моделирование и расчет автоматических систем управления: С.И. Малафеев, А.А. Малафеева. Учебное пособие / «Посад» 2003;
2. Андриевский Б.Р., Фрадков А.Л. Элементы математического моделирования в программных средах MATLAB5 и Scilab. - С.Пб.: Наука, 2001.
3. Горлов В.Н., Малафеев С.И. Основы вычислительных методов. – Владимир, ВлГУ, 1997.
4. Малафеев С.И., Малафеева А.А. Системы автоматического управления. – Владимир, ВлГУ, 1998.
5. Баранов Г.Л., Макаров А.В. Структурное моделирование сложных динамических систем. – Киев: Наукова думка, 1986
6. Холодниок М., Клич А., Кубичек М., Марек М. Методы анализа нелинейных динамических моделей / Пер. с чешск. – М.: Мир, 1991.