Рефераты по международному публичному праву
Рефераты по международному частному праву
Рефераты по международным отношениям
Рефераты по культуре и искусству
Рефераты по менеджменту
Рефераты по металлургии
Рефераты по муниципальному праву
Рефераты по налогообложению
Рефераты по оккультизму и уфологии
Рефераты по педагогике
Рефераты по политологии
Рефераты по праву
Биографии
Рефераты по предпринимательству
Рефераты по психологии
Рефераты по радиоэлектронике
Рефераты по риторике
Рефераты по социологии
Рефераты по статистике
Рефераты по страхованию
Рефераты по строительству
Рефераты по таможенной системе
Сочинения по литературе и русскому языку
Рефераты по теории государства и права
Рефераты по теории организации
Рефераты по теплотехнике
Рефераты по технологии
Рефераты по товароведению
Рефераты по транспорту
Рефераты по трудовому праву
Рефераты по туризму
Рефераты по уголовному праву и процессу
Рефераты по управлению
Курсовая работа: Расчет структурно-алгоритмической схемы системы автоматического регулирования
Курсовая работа: Расчет структурно-алгоритмической схемы системы автоматического регулирования
Московский государственный текстильный университет им. А.Н. Косыгина
Кафедра автоматики и промышленной электроники
Курсовая работа
по дисциплине: «Теория автоматического управления»
на тему: «Расчет структурно-алгоритмической схемы системы автоматического регулирования»
Выполнил: студент гр. 14ВД-06
Кириллов М.В.
Принял: Ермолаев Ю.М.
Москва, 2011 г.
Перечень подлежащих разработке вопросов (содержание расчетно-пояснительной записки)
Математические модели, используемые при выполнении курсовой работы
1. По заданным математическим моделям получить структурно-алгоритмическую схему системы автоматического регулирования
2. Определить передаточные функции разомкнутой системы Y(p) / G(p), замкнутой системы Y(p) / G(p), Y(p) / F(p), E(p) / G(p), E(p) / F(p)
3. Для заданных исходных данных построить область устойчивости системы в плоскости параметров регулятора
4. Для заданной допустимой ошибки регулирования 5% определить значение Kp регулятора, при условии, что регулятор обеспечивает «П» - закон регулирования
5. Для значений параметров регулятора, выбранных произвольно из области устойчивости системы, построить кривые Михайлова и Найквиста
6. Повторить п. 5 задания для значений параметров регулятора, выбранных из области неустойчивой системы
7. Рассчитать настройки регулятора, обеспечивающие минимальное значение интегральной оценки качества
8. Построить переходные характеристики системы по задающему и возмущающему воздействию для значений параметров регулятора выбранных по пп. 5 и 7
9. Определить показания качества системы
Математические модели, используемые при выполнении курсовой работы
Исходные данные: K1 = 2; K2 = 0,7; T1 = 1; T2 = 0,5.
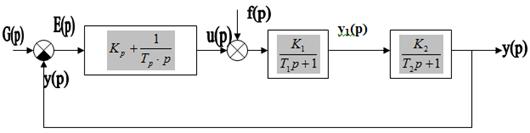
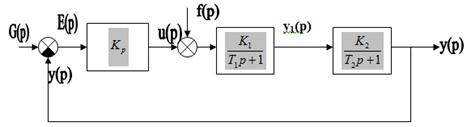
1. По заданным математическим моделям получить структурно-алгоритмическую схему системы автоматического регулирования
а) ![]() -
уравнение сумматора
-
уравнение сумматора
б) ![]() -
уравнение регулятора
-
уравнение регулятора
Применяя операторный метод Лапласа, получим:
![]() ;
;
в) ![]() -
апериодическое звено на выходе
-
апериодическое звено на выходе ![]()
Применяя операторный метод Лапласа, получим:
![]()
![]()
![]() ;
;
г) ![]() -
апериодическое звено (инерционное) на выходе
-
апериодическое звено (инерционное) на выходе ![]()
Применяя операторный метод Лапласа, получим:
![]()
![]()
![]()
Из данных нам математических моделей составим общую структурно-алгоритмическую схему системы автоматического регулирования:
2. Определить передаточные функции разомкнутой системы Y(p) / G(p), замкнутой системы Y(p) / G(p), Y(p) / F(p), E(p) / G(p), E(p) / F(p)
Передаточная функция – это отношение изображений по Лапласу выходной величины к входной при нулевых начальных условиях.
![]()
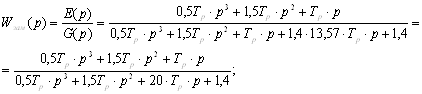
Передаточная функция разомкнутой системы:
![]()

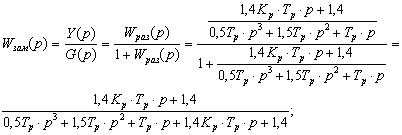
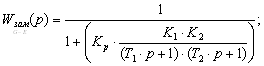
Передаточная функция для замкнутой системы:
![]()
![]()
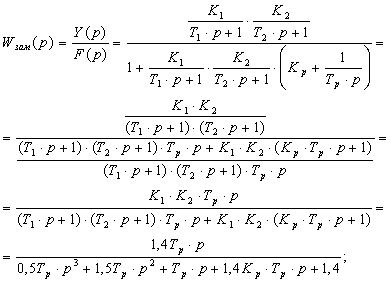
![]()
![]()
3. Для заданных исходных данных построить область устойчивости системы в плоскости параметров регулятора

Чтобы получить характеристическое уравнение нашей системы, приравняем
знаменатель передаточной функции ![]() к нулю.
к нулю.
Система третьего порядка:
![]()
![]()
Представим:
a0 = 0,5Tp; a1 = 1,5Tp; a2 = Tp (1+1,4Kp); a3 = 1,4;
Используем критерии устойчивости Гурвица.
Необходимо и достаточно, чтобы выполнялись следующие условия:
1) ![]() (все
коэффициенты характеристического уравнения положительны);
(все
коэффициенты характеристического уравнения положительны);
2) ![]() >
>![]()
при равенстве а1а2=а0а3 система находится на границе устойчивости.
Система будет устойчива, если:
Тр>0;
![]()
![]()
![]()
![]()
![]()
![]()
По найденному графику функции ![]() построим область устойчивости системы в плоскости
параметров регулятора.
построим область устойчивости системы в плоскости
параметров регулятора.

4. Для заданной допустимой ошибки регулирования 5% определить значение Кр регулятора, при условии, что регулятор обеспечивает «П» - закон регулирования
Структурная схема при использовании «П» - закона регулирования:
Еуст= 5 % = 0,05;
![]()
Wp = Kp;
G(p) = 1(t);
G(p) = g(t);
g(t) = A = 1;
G(p)=![]() ;
;
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
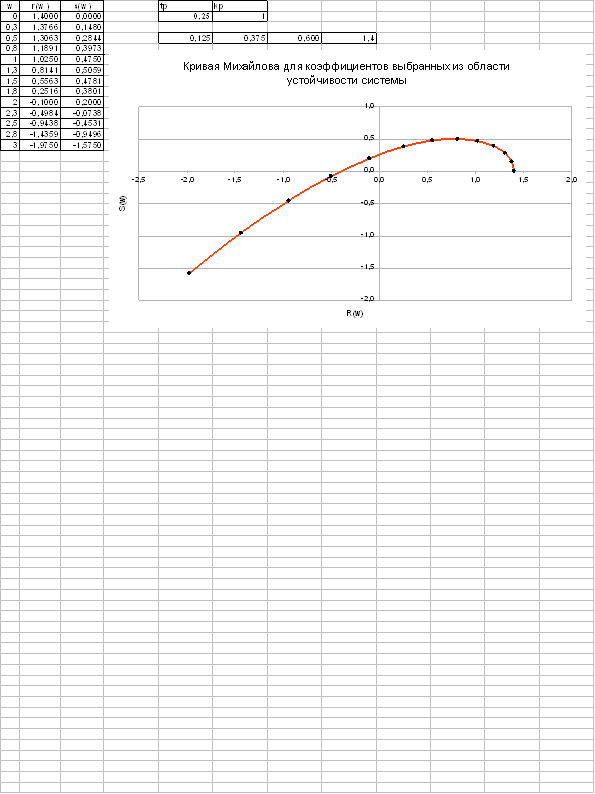
5. Для значений параметров регулятора, выбранных произвольно из области устойчивости системы, построить кривые Михайлова и Найквиста
Выберем произвольно из области устойчивости системы параметры:
Тр=0,25; Кр=1;
Построим кривую Михайлова и Найквиста.
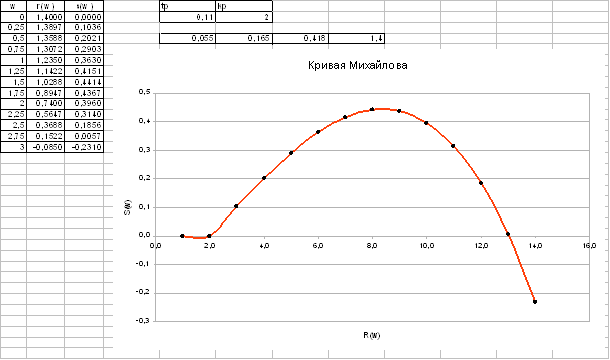
Кривая Михайлова
Характеристическое уравнение нашей системы:
![]()
![]()
![]()
Заменим p на ![]() получим:
получим:
![]()
![]()
![]() ;
; ![]()
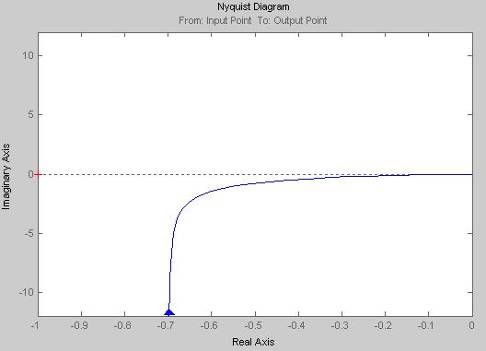
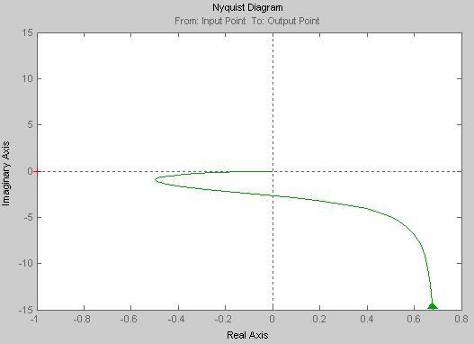
Кривая Найквиста
Строим при помощи MatLab 6.5;
6. Повторить п. 5 задания для значений параметров регулятора, выбранных из области неустойчивой системы
Выберем произвольно из области неустойчивости системы параметры:
Тр=2; Кр=0,11;
Построим кривую Михайлова и Найквиста.
Кривая Михайлова
Характеристическое уравнение нашей системы:
![]()
![]()
![]()
Заменим p на ![]() получим:
получим:
![]()
![]()
![]() ;
; ![]()
Кривая Найквиста
Строим при помощи MatLab 6.5;
7. Рассчитать настройки регулятора, обеспечивающие минимальное значение интегральной оценки качества
Вычислим квадратичную интегральную оценку методом Мандельштама.
![]()

Для получения ![]() и
и ![]() вычислим квадратичную
интегральную оценку.
вычислим квадратичную
интегральную оценку.
К1=2; К2=0,7; Т1=1; Т2=0,5; Кр=13,57;
 (1)
(1)
![]()

![]()
Запишем знаменатель выражения (1) в виде:
![]()
Обозначим: а0=0,5Тр; а1=1,5Тр; а2=20Тр; а3=1,4;
![]() (2)
(2)
Обозначим: ![]() .
.
Умножаем поочередно уравнение (2) на ![]() .
.
![]() (3)
(3)
![]() (4)
(4)
![]() (5)
(5)
2) Почленно интегрируем уравнения (3), (4) и (5).




В итоге, интегрирование (3) уравнения дает:
![]()

![]()
Уравнение (4):
![]()

В итоге, интегрирование (4) уравнения дает:
![]()

![]()
Уравнение (5):



В итоге, интегрирование (5) уравнения дает:
![]()

![]()
3) Получаем систему из трех уравнений относительно 3-х неизвестных:
Выразим ![]() и
и ![]() :
:


Выразим ![]() :
:
![]()
![]()
![]()
![]()
4) Берем производную по ![]() и приравниваем к нулю:
и приравниваем к нулю:
![]()
![]()
![]()
![]()
![]()
8. Построить переходные характеристики системы по задающему и возмущающему воздействию для значений параметров регулятора выбранных по пп. 5 и 7
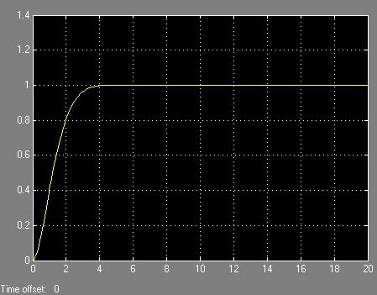
Переходная характеристика по задающему воздействию для значений параметров регуляторов выбранных из пункта № 5.
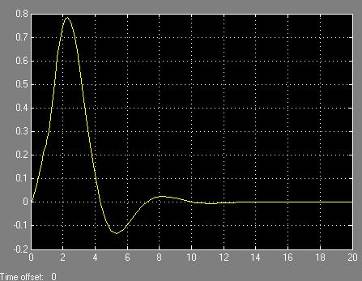
Переходная характеристика по возмущающему воздействию для значений параметров регуляторов выбранных из пункта № 5.
автоматический кривая михайлов найквист регулятор
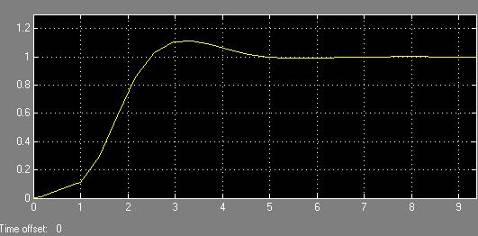
Переходная характеристика по задающему воздействию для значений параметров регуляторов выбранных из пункта № 7.
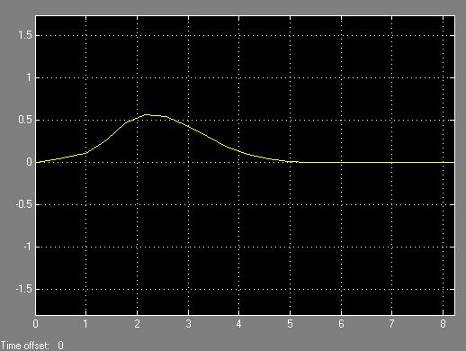
Переходная характеристика по возмущающему воздействию для значений параметров регуляторов выбранных из пункта № 7.
9. Определить показатели качества системы
Переходная характеристика по задающему воздействию для значений параметров регуляторов выбранных из пункта № 5.
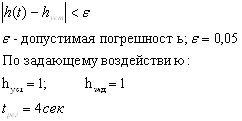
Время регулирования
Теоретически время достижения выходной координаты до заданного значения равно бесконечности, поэтому вводится допустимая погрешность.
В момент, когда выходная координата попадает в область допустимых значений и больше из нее не выходит, считается окончанием процесса регулирования.
Статическая точность
![]()
Характеризует статический режим в системе и не зависит от динамики переходного процесса.
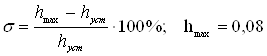
Величина перерегулирования
Перерегулирование – это максимальное превышение регулируемой величины над установившемся значением.

Колебательность
Система совершила за время регулирования 2 полных колебания.
По возмущающему воздействию:
tрег = 5,5 сек
![]()
По пункту 7
По задающему воздействию:
tрег = 2,2 сек
![]()
![]()
1 полное колебание.
По возмущающему воздействию:
tрег = 18 сек
![]()