
Рефераты по международному публичному праву
Рефераты по международному частному праву
Рефераты по международным отношениям
Рефераты по культуре и искусству
Рефераты по менеджменту
Рефераты по металлургии
Рефераты по муниципальному праву
Рефераты по налогообложению
Рефераты по оккультизму и уфологии
Рефераты по педагогике
Рефераты по политологии
Рефераты по праву
Биографии
Рефераты по предпринимательству
Рефераты по психологии
Рефераты по радиоэлектронике
Рефераты по риторике
Рефераты по социологии
Рефераты по статистике
Рефераты по страхованию
Рефераты по строительству
Рефераты по таможенной системе
Сочинения по литературе и русскому языку
Рефераты по теории государства и права
Рефераты по теории организации
Рефераты по теплотехнике
Рефераты по технологии
Рефераты по товароведению
Рефераты по транспорту
Рефераты по трудовому праву
Рефераты по туризму
Рефераты по уголовному праву и процессу
Рефераты по управлению
Курсовая работа: Автоматизация технологических процессов колпаковой печи
Курсовая работа: Автоматизация технологических процессов колпаковой печи
Министерство образования и науки Украины
Приазовский государственный технический университет
Кафедра АТП и П
Пояснительная записка
к курсовому проекту по дисциплине «АСУ ТП в ЧМ»
на тему: «АСУ ТП колпаковой печи»
Мариуполь, 2010
Реферат
Пояснительная записка: 41 с., 4 рис., 1 табл., 2 приложения, 5 источников.
В первой части пояснительной записки описывается процесс термической обработки металла в колпаковых печах, выделяются основные контуры контроля и регулирования, колпаковая печь рассматривается как объект управления.
Во второй части, на основе рассмотренного технологического процесса, создается система автоматизации колпаковой печи. Приводится описание контуров, созданных чертежей и т.д. Разрабатывается структурная и функциональная схемы автоматизации, принципиально-электрическая схема подключения приборов контура контроля и регулирования.
В третьей части пояснительной записки рассмотрена математическая модель процесса регулирования температурой и соотношением «топливо-воздух» в колпаковой печи.
АВТОМАТИЗАЦИЯ, ОБРАБОТКА МЕТАЛЛА, КОЛЛИЧЕСТВО ТЕПЛОТЫ, МУФЕЛЬ, ЗАЩИТНЫЙ ГАЗ, ФУНКЦИОНАЛЬНАЯ СХЕМА, КОНТУР УПРАВЛЕНИЯ, ТЕХНИЧЕСКИЕ СРЕДСТВА, МИКРОКОНТРОЛЛЕР, МАТЕМАТИЧЕСКАЯ МОДЕЛЬ.
Содержание
Введение
1. Конструкция агрегата и описание технологического процесса
1.1 Теория термической обработки
1.2 Характеристика металла, подвергаемого термической обработке
1.3 Режим термической обработки листов и полос в рулонах
2. Колпаковая печь как объект автоматизации
3. Разработка структурной схемы АСУ ТП
4. Функциональная схема системы автоматизации, выбор технических средств контроля и управления АСУТП
5. Построение принципиальной электрической схемы
6. Решение поставленных функциональных задач
6.1 Постановка и описание задач
6.2 Алгоритм расчета управляющего воздействия регулятора
6.3 Блок схема расчетной части задач
Заключение
Список используемой литературы
Приложения
автоматизация колпаковая печь металл
Автоматизация широко внедряется в металлургическое производство. Уже сейчас невозможно представить себе теплотехнический агрегат современного металлургического завода, работающий без необходимых приборов контроля и регулирующей аппаратуры.
Внедрение автоматизации тепловых металлургических агрегатов приводит к сокращению участия рабочей силы в их управлении. Благодаря автоматизации появляется возможность увеличить производительность агрегата и снизить себестоимость продукции. Труд работников, обслуживающих автоматизированные агрегаты, значительно облегчается в результате применения механизмов и регуляторов.
Уменьшение количества ручного труда позволяет работникам значительную часть времени уделять наблюдению и анализам технологического процесса, искать средства для его интенсификации, своевременно предупреждать возможности появления брака производства и возникновения аварий агрегата.
Успешное внедрение автоматики и правильная эксплуатация автоматизированного агрегата во многом зависит от того, насколько обслуживающий персонал знаком с принципом работы, установленной на агрегате системы автоматического контроля и регулирования.
1. Конструкция агрегата и описание технологического процесса
Задача управления процессом нагрева в колпаковых печах заключается в обеспечении режима работы, при котором получается металл заданного качества при работе печи с максимальной производительностью.
Колпаковые печи относят к печам камерного типа с изменяющимся во времени тепловым режимом. В первый период нагрева необходимо получить максимальную скорость нагрева и поэтому подается количество тепла, соответствующее наибольшей тепловой мощности. Это происходит до тех пор, пока наиболее быстро нагревающаяся часть садки или колпака не достигнет заданной температуры. После этого начинается период выравнивания температуры при постепенно понижающемся расходе топлива.
В колпаковых печах верх садки нагревается и остывает быстрее чем низ, так как теплообмен происходит с боковой и верхней частями муфеля. Иногда быстрее нагревается нижний рулон, что происходит благодаря влиянию горелок, расположенных в нижней части колпака. Большая неравномерность наблюдается и по сечению садки - средние витки рулонов греются медленнее. Эта неравномерность может быть уменьшена за счет достаточной длительности выдержки.
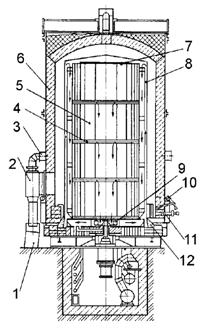
Рис. 1.1 Внешний вид колпаковой печи
1. Вход в дымовой боров.
2. Инжектор.
3. Кольцевой канал сжатого воздуха.
4. Конвекторное кольцо.
5. Рулон
6. Нагревательный колпак.
7. Крышка
8. Двойной муфель
9. Рабочее колесо вентилятора
10. Газопровод
11. Горелка
12. Песочный затвор.
Продолжительность подачи в печь максимального количества тепла зависит от равномерности нагрева. При большой неравномерности сокращение подачи топлива приходится начинать еще в тот период, когда садка способна воспринимать тепло и характеризуется невысокой средней температурой. Практика работы показывает, что рациональным значением тепловой мощности следует считать такое, при котором температура муфеля достигает 800-850 0С за 2-3ч. Мощность одностопных печей обычно принимают 17.5-23.5 кВт/т садки.
1.1 Теория термической обработки
Отжиг – процесс термической обработки, обуславливающий получение равновесных (устойчивых) структур распада аустенита во время охлаждения, с определённых температур нагрева в интервале превращений или выше. Отжиг осуществляется путём нагрева стальных листов и рулонов до (или выше) температуры в интервале превращений, продолжительной выдержки при этой температуре и последующего медленного охлаждения. В процессе отжига происходит изменение дисперсных фаз и размера зёрен аустенита; в результате получается равновесная структура феррито–цементной смеси, снижается твёрдость и повышается пластичность и вязкость.
Отжиг применяется с целью снятия напряжений, улучшения пластичных свойств, устранения структурной неоднородности.
Применяемая термообработка может быть классифицирована следующим образом:
а) смягчающий отжиг;
б) рекристаллизационный отжиг;
в) отпуск.
Смягчающий отжиг проводится для разупрочнения горячекатанных листов и заготовок легированных сталей. Сталь после прокатки может иметь различную структуру и различные механические свойства в зависимости от степени деформации, от температуры конца горячей прокатки, от скорости охлаждения и т.п. Поэтому при выборе режима отжига стали после прокатки, кроме химического состава, учитывается также структура и твёрдость стали.
Смягчающим отжигом добиваются коагуляции карбидов стали, увеличения размера зерна, снятия н6апряжений и понижение твёрдости.
Рекресталлизационный отжиг – процесс термической обработки, обуславливающий исправление искажений кристаллической решётки., полученной при холодном деформировании металла.
Рекресталлизационный отжиг осуществляется путём нагрева стали до температуры 150 - 250°С, выше температуры начала роста новых зёрен, образующихся взамен деформированных, выдержки при этой температуре и последующего медленного охлаждения. При рекресталлизационном отжиге происходит рост новых зёрен, образовавшихся взамен легированных, снятие наклёпа и внутренних напряжений при коагуляции цементита и образование зернистого перлита, увеличение пластичности стали, снижение прочностных свойств.
Отпуск процесс термической обработки, обуславливающий превращение неустойчивых структур закалённого (полученного в процессе ускоренного охлаждения) состояние в более устойчивые. Отпуск осуществляется путём нагрева металла до температуры ниже интервала превращений, выдержки при этой температуре и последующего охлаждения.
В результате отпуска получаются более устойчивые структуры по схеме мартенсит – троостит – сорбит, как следствии этого, получаются требуемые механические свойства как снятие внутренних напряжений.
В термическом отделении имеется 8 газовых колпаковых печей. Каждая печь имеет один нагревательный колпак, три стенда и три муфеля. Есть один резервный стенд на все отделения, используемый при ремонте основных стендов.
Нагревательный колпак состоит из металлического сварного каркаса и футеровки толщиной 230 мм. Из легковесного шамотного кирпича БЛ – 08. Между металлической обшивкой каркаса и кладкой – слой асбестового картона (5мм.) для уплотнения и компенсации расширения кладки в процессе её нагрева.
Масса колпака 45 т., внутренние размеры: длина 7,5 м., ширина 3,0 м., длина 2,3 м. В нижней части нагревательного колпака установлены три мижекционные горелки – по 12 на каждой боковой и по 4 на каждой торцевой стенке колпака, работающие на природном газе, калорийностью 8300 ккал/мм3.
В верхней части нагревательного колпака имеются проёмы для отбора продуктов сгорания, которые отсасываются с помощью двух воздушных эжекторов, укреплённых вместе с дымонаправляемыми патрубками на каркасе печи. Подача газа к печным коллекторам и горелкам, а также воздуха к эжекторам производится с помощью гибких шлангов от стационарных трубопроводов с запорной и регулирующей арматурой.
Точность установки колпака на печь обеспечивается вертикальными направляющими штырями, закреплёнными на стенде, и направляющими проушины на колпаке.
Сверху нагревательный колпак имеет специальный захват для переноса его мостовым краном грузоподъемностью 125/20 с двурогим крюком.
Стенд представляет собой сварную металлическую раму, обшитую листами железа, сваренным между собой сплошным газоплотным швом и футерованную. Огнеупорным кирпичом. Длина рабочей части стенда 6300 мм., ширина 2500 мм. Верхняя часть кладки стенда накрывается плитами из стали СТ 3, толщиной от 20 до 40 мм. На стенд укладываются плиты одной толщины. Под стендовой плитой упакованы электронагреватели в виде проволочных ленточных спиралей из нихрома. Диаметр проволоки 4,5 мм., сечение полосы 2,0 * 20,0 мм. Общая мощность электронагревателей одного стенда составляет 75 кВт.
Муфели сварные, из жаростойкой листовой стали типа 318Н10Т толщиной 3,00. Масса муфеля 1,6 т. Внутренние размеры: 2*80*6720*2160мм.
1.2 Характеристика металла, подвергаемого термической обработке
Светлому отжигу подвергаются:
- травленные горячекатаные листы (заготовки) углеродистых сталей, травленные горячекатаные листы легированных сталей, мартенситных и мартенсито – ферритных усталей (нержавеющих);
- холоднокатаные листы легированных и углеродистых сталей после окончательной прокатки;
- листы высокопрочных сталей в промежуточной толщине;
- горячекатаные и холоднокатаные рулоны низколегированной и углеродистой стали.
Смягчающий отжиг горячекатаных нетравленых рулонов мартенситных и мартенсито – ферритных нержавеющих сталей производится без защитного газа.
Листовой прокат высокопрочных легированных и мартенситных нержавеющих сталей толщиной более 6,0 мм. перед травлением подвергаются отпуску без подачи защитного газа по температурному режиму.
Горячекатаные не травленные рулоны легированных сталей перед порезкой на разделочном агрегате № 2 подвергаются отпуску без подачи защитного газа по температурному режиму.
Нагартованные листы высокопрочных сталей СП28 – 43 конечной и промежуточной (не более 3,8 мм) толщин (кроме листов шириной разной или более 2000 мм.) перед отжигом подвергаются обезжиривающей обработке в моечном агрегате для удаления прокатной смазки.
Листы промежуточных толщин перед обеззараживанием, с целью предотвращения гуммированных в и капроновых роликов моечного агрегата, при необходимости подвергается обрезке утоненной кромки переднего конца
(второй коней не обрезается).
Размеры листов для термической обработки в отжигательных прямоугольных печах (мм.):
горячекатаные
| толщина | 3,0 – 10,2 |
| ширина | 1000 - 2500 |
| длина | до 6000 |
холоднокатаные
| толщина | 1,0 – 6,0 |
| ширина | 1000 - 2500 |
| длина | до 6000 |
1.3 Режим термической обработки листов и полос в рулонах
Цели термической обработки горячекатаных и холоднокатаных листов и полос в рулонах – снятие наклёпа, полученного металлом при прокатке и получение требуемых нормативно – технической документацией механических свойств металла при сохранении светлой поверхности.
По своему характеру применения термообработка может быть классифицирована по следующим видам:
а) смягчающий отжиг – для разупрочнения горячекатаных листов и заготовок легированных сталей;
б) рекристализационный отжиг - для разупрочнения холодно - катаного металла;
в) отпуск для снятия напряжений – для предотвращения растрескивания горячекатаных заготовок при травлении;
Весь цикл термообработки разделяется на нагрев, выдержку и охлаждение.
При достижении зональной термопарой температурного задания в соответствии с режимом отжига, указанным в технологических картах, производится автоматическое регулирование печи, осуществляемое через термопару типа ТХА, преобразователь, контроллер, исполнительный механизм.
При отжиге легированных и нержавеющих сталей стендовые электрические нагреватели в обязательном порядке включаются временно с запуском в работу нагревательного колпака.
Выдержка при отжиге листов всех марок сталей и рулонов нержавеющих и легированных сталей начинается с момента достижения заданной температуры технологическими термопарами № 2 (средней) № 3 (стендовой), а при отжиге рулонов углеродистой стали - с момента достижения заданной температуры по кромочной термопаре.
В случаи перегорания технологических термопар отжиг ведётся по аналогии с ранее проведёнными отжигами.
После окончании выдержки садка металла охлаждается под колпаком или под муфелем. Во время охлаждения под муфель непрерывно подаётся защитный газ. Перед снятием нагревательного колпака со стенда термистом в обязательном порядке производится разборка микросхем печи. Подъем колпака осуществляется в три приёма:
- первоначально медленный подъем на высоту 300 – 400 мм. с обязательным поправлением песочного затвора (продолжительность остановки не менее 1 минуты);
- медленный подъем на 1/2 высоты муфеля, остановка не менее 2 минут;
- подъем до высоты крыши муфеля остановка не менее 2 минут;
Во избежание подсоса воздуха в под муфельное пространство печи не допускается задувание, подрыв муфеля элементами конструкций колпака при его подъеме.
Садка металла распаковывается при достижении отставной термопарой № 2 (при отжиге листового металла или термической обработке горячекатаных натравленных рулонов легированных, мартенситных и мартенсито – ферритных нержавеющих сталей) или кромочной термопарой ( при отжиге остальных рулонов).
При распаковке пачкам или рулонам холоднокатаных листов присваивают номера партий. Контрольные пачки или рулоны обозначаются в соответствии с требованиями нормативно – технической документации.
Подогрев перед прокаткой горячекатанных заготовок и холоднокатанных сталей СП28 – 43, ВЛ – ІД, ВКС – 1 толщиной более 4,0 мм. производится по следующему режиму: температура зональной термопары – 750° С; температура средней технологической термопары –100 - 200° С, без выдержки.
После снятия колпака садки металла охлаждается под муфелем 3 – 4 часа с целью выравнивания температуры по ширине и длине листа.
Упаковка металла на стенд согласно предыдущим инструкциям.
Партия холоднокатаных листов легированных сталей, имеющих повышенное содержание углерода, подвергаются повторному отжигу.
Повторный отжиг производится по следующей температуре:
а) перед упаковкой металла на стенд кладка стенда должна быть регенерирована, либо выполнена заново и просушена;
б) на протяжении всего отжига (нагрев, выдержка и охлаждение) природный газ в под муфельное пространство не подаётся;
в) горячая продувка производится от момента установки колпака до его снятия;
г) температурный режим отжига – согласно настоящей технологической инструкции.
2. Колпаковая печь как объект автоматизации
Колпаковая печь с точки зрения автоматического регулирования является емкостным статическим объектом с большим значением постоянной времени Т и малым по величине отношением - t/Т менее 0,2.
Объект управления характеризуется следующими входными параметрами:
- Расходом газа (Fг);
- Расходом воздуха (Fв);
- Расходом защитного газа (Fзг);
- Расходом продуктов сгорания (Fпр сг).
Основными возмущающими воздействиями в процессе нагрева металла являются:
- Изменения характеристики садки (массы и размеров рулона, марки металла, его толщины, плотности намотки) (fхс);
- Изменение давления и калорийности газа (fд);
- Изменение давления в печи (fдп).
Управляющие воздействия:
- Температура садки (tc);
- Температура под муфелем (tм);
- Давление в печи (Рп);
- Давление в дымовом борове (Рдб).
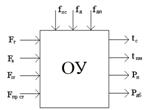
Рис 2.1. Схематическое изображение колпаковой печи как объекта управления.
Перечень контролируемых параметров объекта управления одностопной колпаковой печи, с указанием рабочего диапазона их изменения и необходимой точности измерения, приведен в таблице 3.1
Таблица 2.1 Контролируемые параметры объекта управления.
| Контролируемый параметр | Рабочий диапазон изменения | Класс точности |
| Давление природного газа, Па | 6867-7848 | 1,5 |
| Давление защитного газа, Па | 147,15-343,35 | 1,5 |
| Давление воздуха, Па | 5395 | 1 |
| Температура свода, С | 540-810 | 0,5 |
| Температура под муфелем, С | 640-910 | 0,5 |
| Температура рулонов , С | 540-810 | 0,5 |
| Давление отходящих газов, мм.вод.ст | -15…5 | 1 |
3. Разработка структурной схемы АСУ ТП
Структурная схема автоматизации представлена в графической части проекта (лист 1).
Работу системы автоматизации колпаковой печи можно представить в виде структурной схемы. Система автоматизации представляет собой трехуровневую структуру, состоящую из таких уровней:
1. Уровень измерительных средств. Состоит из датчиков, регулирующих органов, исполнительных механизмов. Он предназначен для преобразования технологических величин (температура, давление и т.д.) в электрические величины, удобные для передачи на второй уровень автоматизации.
2. Уровень локальных средств контроля и регулирования. Представляет собой уровень, на котором осуществляется контроль и регулирование параметров процесса при помощи средств контроля и измерения, находящихся на территории каждого объекта автоматизации. Эти средства расположены на щитах КИП и А и представляют собой: преобразователи, цифровые индикаторы, средства сигнализации, станции управления. Также на этом уровне расположен микроконтроллер, с помощью которого производится ввод заданных значений, управление видеотерминалом, связь с объектом, управление устройствами ввода-вывода. Микроконтроллер осуществляет управление технологическим процессом на данном уровне автоматизации, а также поддерживает связь с верхним уровнем автоматизации. На этом уровне система выполняет такие функции: контроль параметров, дистанционное управление технологическим оборудованием, измерительное преобразование, контроль и сигнализацию измеряемых параметров, стабилизирующее регулирование, регистрацию параметров, выдачу оперативной информации в АСУТП и получение от него производственных заданий. На этом уровне расположены средства диспетчерской и производственной громкоговорящей связи. На верхней ступени этого уровня стоит газовщик, который с помощью видеотерминала и устройств ввода-вывода непосредственно контролирует и регулирует определенные параметры процесса.
3. На верхнем уровне находится рабочая станция управления ходом продувки. Верхний уровень осуществляет следующие функции: контроль и сигнализация значений параметров, ручной ввод данных, учет производства и составление данных за смену, оптимизация отдельных техпроцессов, оценка работы смены, расчет технико-экономических показателей, контроль выполнения плановых заданий.
4. Функциональная схема системы автоматизации, выбор технических средств контроля и управления АСУТП
Функциональная схема автоматизации представлена графической части проекта (лист 2).
Функциональная схема автоматизации содержит следующие контуры контроля и регулирования:
- контур контроля и регулирования температуры под колпаком печи;
- контур контроля и регулирования соотношения топливо-воздух;
- контур контроля и сигнализации давления под колпаком печи;
- контур контроля температуры среды под муфелем;
- контур контроля расхода дымовых газов;
- контур контроля температуры отходящих дымовых газов.
- контур контроля и регулирования расхода защитных газов.
Выбор технологических средств контуров контроля и регулирования был обусловлен пределами измерения технологических параметров и условиями эксплуатации.
1. Контур контроля и регулирования температуры под колпаком печи.
Сигнал с термопары поз.1-1 тип ТХА-0192 через преобразователь поз.1-2 тип МТМ 402-01, который служит показывающим прибором, поступает на вход аналоговых сигналов В1 микроконтроллера. С задатчика БРУ-7 (поз. 1-3) в контроллер на дискретный вход B3 поступает информация о том, будет ли температура задаваться при помощи задатчика вручную, либо задание будет осуществляться с рабочей станции на основании расчета. Если температура задается вручную, в контроллер, кроме этого, на вход В2 заводится сигнал с задатчика БРУ-7 (поз. 1-3).
Контроллер на основании полученных данных определяет сигнал ошибки между текущим и заданным значением температуры под колпаком, и по этой ошибке, по встроенному ПИД-алгоритму рассчитывает управляющее воздействие, которое в виде токового сигнала 4-20 мА с выхода В/ВО2 поступает на регулирующий клапан в комплекте с цифровым регулирующим контроллером DVC6010 (поз. 1-4). По этой же линии клапан и контроллер обмениваются информацией по HART-протоколу. Положение клапана, полученное по HART-протоколу на вход В/ВО2, показывается на индикаторе БРУ-7 (поз. 1-3).
2. Контур контроля и регулирования соотношения топливо-воздух.
Сигнал с датчика расхода топлива Метран-100 ДД, поз 2-1 поступает на вход преобразователя токового сигнала МТМ 310С, поз 2-2, который так же является показывающим прибором на щите КИПиА, после чего поступает на вход В4 микроконтроллера. Аналогично на вход контроллера В5 через преобразователь МТМ 310С поз 3-2, поступает сигнал с датчика расхода воздуха Метран 100ДД, поз 3-1. С задатчика БРУ-7 (поз. 3-3) в контроллер на дискретный вход B7 поступает информация о том, будет ли соотношение задаваться при помощи задатчика вручную, либо задание будет осуществляться с рабочей станции на основании расчета. Если соотношение задается вручную, в контроллер, кроме этого, на вход В6 заводится сигнал с задатчика БРУ-7 (поз. 3-3).
Контроллер на основании полученных данных определяет сигнал ошибки между текущим и заданным значением, и по этой ошибке, по встроенному ПИД-алгоритму рассчитывает управляющее воздействие, которое в виде токового сигнала 4-20 мА с выхода В/ВО4 поступает на регулирующий клапан в комплекте с цифровым регулирующим контроллером DVC6010 (поз. 3-4). По этой же линии клапан и контроллер обмениваются информацией по HART-протоколу. Положение клапана, полученное по HART-протоколу на вход В/ВО4, показывается на индикаторе БРУ-7 (поз. 3-3).
3. Контур контроля и сигнализации давления под колпаком печи;
Сигнал с датчика расхода топлива Метран-100 ДИ, поз 4-1 поступает на вход преобразователя токового сигнала МТМ 310С, поз 4-2, который так же является показывающим прибором на щите КИПиА, после чего поступает на вход В8 микроконтроллера. В контроллере осущесвляется анализ полученного значения и при достижении им критической величины, срабатывает световая сигнализация. Сигнал поступает на лампу HL1 с выхода ВО5 микроконтроллера.
4. Контур контроля температуры среды под муфелем;
Сигнал с термопары поз.5-1 тип ТХА-0192 через преобразователь поз. 5-2 тип МТМ 402-01, который служит показывающим прибором, поступает на вход аналоговых сигналов В9 микроконтроллера.
5. Контур контроля расхода дымовых газов
Сигнал с датчика расхода поз 6-1 тип Метран100 ДД через преобразователь поз. 6-2 тип МТМ 310С, который служит показывающим прибором, поступает на вход аналоговых сигналов В10 микроконтроллера.
6. Контур контроля температуры отходящих дымовых газов
Сигнал с термопары поз.7-1 тип ТХА-0192 через преобразователь поз. 7-2 тип МТМ 402-01, который служит показывающим прибором, поступает на вход аналоговых сигналов В11 микроконтроллера.
7. Контур контроля и регулирования расхода защитных газов.
Сигнал с датчика расхода топлива Метран-100 ДД, поз 8-1 поступает на вход преобразователя токового сигнала МТМ 310С, поз 8-2, который так же является показывающим прибором на щите КИПиА, после чего поступает на вход В4 микроконтроллера. С задатчика БРУ-7 (поз. 8-3) в контроллер на дискретный вход B14 поступает информация о том, будет ли расход газов задаваться при помощи задатчика вручную, либо задание будет осуществляться с рабочей станции на основании расчета. Если соотношение задается вручную, в контроллер, кроме этого, на вход В13 заводится сигнал с задатчика БРУ-7 (поз. 8-3).
Контроллер на основании полученных данных определяет сигнал ошибки между текущим и заданным значением, и по этой ошибке, по встроенному ПИД-алгоритму рассчитывает управляющее воздействие, которое в виде токового сигнала 4-20 мА с выхода В/ВО7 поступает на регулирующий клапан в комплекте с цифровым регулирующим контроллером DVC6010 (поз. 8-4). По этой же линии клапан и контроллер обмениваются информацией по HART-протоколу. Положение клапана, полученное по HART-протоколу на вход В/ВО7, показывается на индикаторе БРУ-7 (поз. 8-3).
5. Построение принципиальной электрической схемы
В курсовом проекте разработана принципиально-электрическая схема контура контроля и регулирования температуры под колпаком печи. В состав данного контура входят: датчик температуры ТХА-0192, преобразователь сигнала термопар МТМ 402-01, блок ручного управления БРУ-7, регулирующий клапан в комплекте с цифровым регулирующим контроллером DVC-6010, микроконтроллер ROC 809, имеющий свой модуль питания и следующие модули расширения: аналогового ввода AI-12, аналогового вывода АО-16, дискретного ввода DI, модуль HART. Преобразователь, блок ручного управления питаются от сети ~220 В. Микроконтроллер питается от внешнего блока питания БП-24. Регулирующий клапан питается непосредственно через информационные входы.
Сигнал с термопары поступает на клеммы 1-2 модуля Х2 преобразователя МТМ 402-01 (поз 1-2), и через клеммы 1-2 модуля Х1 нормализованный сигнал подается на клеммы 1-2 модуля аналогового ввода AI 12 микроконтроллера.
Заданная температура с блока ручного управления (поз. 1-3) (клеммы 9-10) передается на клеммы 3-4 модуля аналогового ввода AI-12.
С клемм 10-11-12 блока ручного управления (поз. 1-3) на клеммы 1-2-10 модуля дискретного входа DI контроллера поступает сигнал о том, будет ли задание расхода кислорода осуществляться вручную (замкнуты клеммы 9-10) или с рабочей станции (замкнуты клеммы 11-10).
С клемм 1-2 модуля аналогового вывода АО-16 на клеммы 1-2 задатчика (поз. 6-3) поступает сигнал о положении регулирующего клапана.
Следует отметить, что так как почти везде используются токовые сигналы, то соединение выводов должно быть перекрестным, то есть «+» прибора подключается к «-» модуля контроллера, а «-» прибора подключается к «+» модуля контроллера.
6. Решение поставленных функциональных задач
6.1 Постановка и описание задач
Предположим,
что до внесения возмущения по нагрузке объект управления находится в состоянии
динамического равновесия при ![]() .
Внесенное возмущение вызовет отклонение регулируемой координаты от заданного
значения, которое можно описать следующим дифференциальным уравнением
.
Внесенное возмущение вызовет отклонение регулируемой координаты от заданного
значения, которое можно описать следующим дифференциальным уравнением
![]() (6.1.1.1)
(6.1.1.1)
где ![]()
![]() -
отклонение заданного значения регулируемой координаты от текущего (величина,
противоположная по знаку сигналу ошибки);
-
отклонение заданного значения регулируемой координаты от текущего (величина,
противоположная по знаку сигналу ошибки);
Z – возмущение;
У – управляющее воздействие;
![]() - постоянная времени;
- постоянная времени;
![]() -коэффициент передачи объекта управления;
-коэффициент передачи объекта управления;
Решим уравнение (9.1.7) относительно производной
![]() (6.1.1.2)
(6.1.1.2)
Значение производной величины Х можно вычислить по формуле:
![]() (6.1.1.3)
(6.1.1.3)
где![]() – значение величины
– значение величины ![]() в конце шага расчета;
в конце шага расчета;
![]() – значение величины
– значение величины ![]() в начале шага расчета;
в начале шага расчета;
![]() временной шаг расчета.
временной шаг расчета.
Приравнивая правые части уравнений (6.1.1.2) и (6.1.1.3) и решая полученное уравнение относительно Х(2), получим
![]() .(6.1.1.4)
.(6.1.1.4)
Начальное
значение координаты ![]() в начале первого
шага расчета принимают равным нулю. Чтобы пользоваться уравнением (6.1.1.4) для
расчета последующих значений координаты
в начале первого
шага расчета принимают равным нулю. Чтобы пользоваться уравнением (6.1.1.4) для
расчета последующих значений координаты ![]() ,
необходимо после каждого шага расчета выполнить вычисление
,
необходимо после каждого шага расчета выполнить вычисление
![]() (6.1.1.5)
(6.1.1.5)
Отметим, что при
![]() (6.1.1.6)
(6.1.1.6)
выражения (6.1.1.5) и (6.1.1.6) позволяют рассчитывать кривую разгона объекта управления.
Когда статический объект управления обладает запаздыванием, при расчете кривой разгона поступают следующим образом. Сначала вычисляют число
![]() (6.1.1.7)
(6.1.1.7)
Затем ![]() округляют до ближайшего
целого значения N и набирают массив (N+1) нулевых значений координаты
округляют до ближайшего
целого значения N и набирают массив (N+1) нулевых значений координаты ![]() . После этого выражение для
расчета кривой разгона статического объекта управления примет вид:
. После этого выражение для
расчета кривой разгона статического объекта управления примет вид:
![]() (6.1.1.8)
(6.1.1.8)
Следует
отметить, что запись значений координаты ![]() ведут
с нулевого момента времени (момента внесения возмущения Z), то есть каждый раз
записывают координату
ведут
с нулевого момента времени (момента внесения возмущения Z), то есть каждый раз
записывают координату ![]() . Каждое последующее
вычисление по выражению (6.1.8) выполняют после процедуры присвоения:
. Каждое последующее
вычисление по выражению (6.1.8) выполняют после процедуры присвоения:
![]() (6.1.1.9)
(6.1.1.9)
Данный алгоритм, а практически формулы (6.1.1.8) и (6.1.1.9) легли в основу построения модели объекта.
6.2 Алгоритм расчета управляющего воздействия регулятора
Рассмотрим алгоритмы расчета управляющих воздействий регуляторов, реализующих типовые непрерывные законы регулирования. Запишем уравнение идеального непрерывного П – регулятора
![]() ,
,
где ![]() - управляющее воздействие;
- управляющее воздействие;
![]() - коэффициент передачи И – регулятора;
- коэффициент передачи И – регулятора;
![]() - сигнал ошибки.
- сигнал ошибки.
Расчет управляющего воздействия на ЭВМ производится в дискретные моменты времени. Следовательно, вычисление управляющего воздействия П – регулятора будем производить по следующему алгоритму:
![]() (6.1.2.1)
(6.1.2.1)
конкретные алгоритмы расчета управляющего воздействия зависят от места приложения возмущающего воздействия. Так при расчете переходных процессов, вызванных возмущениями по нагрузке, ЭВМ вычисляет в дискретные моменты времени координату
![]() (6.1.2.2)
(6.1.2.2)
Координата ![]() представляет собой сигнал
ошибки с отрицательным знаком
представляет собой сигнал
ошибки с отрицательным знаком
![]() (6.1.2.3)
(6.1.2.3)
Таким образом, при расчете переходных процессов, вызванных возмущениями по нагрузке, управляющее воздействие П-регулятора вычисляют по выражению
![]() (6.1.2.4)
(6.1.2.4)
Расчет переходных процессов в АСУ потребует ввода значения управляющего воздействия регуляторов в начальный (нулевой) момент времени. В этот момент времени, когда к объекту возмущения приложено возмущение по нагрузке, сигнал ошибки отсутствует и управляющее воздействие П-регулятора равно нулю
![]() (6.1.2.5)
(6.1.2.5)
Когда к системе приложено скачкообразное возмущение по заданию, ЭВМ вычисляет отклонение регулируемой координаты от начального заданного значения
![]() (6.1.2.6)
(6.1.2.6)
Так как для расчета переходного процесса в ЭВМ вводится только величина скачкообразного возмущения по заданию
![]() (6.1.2.7)
(6.1.2.7)
то выражение для входной величины регулятора (сигнал ошибки) будет таким
 (6.1.2.8)
(6.1.2.8)
Следовательно, уравнение П-регулятора при расчете переходных процессов, вызванных скачкообразными возмущениями по заданию, приобретает вид
![]() (6.1.2.9)
(6.1.2.9)
В начальный (нулевой) момент времени, когда к регулятору приложено скачкообразное возмущение по заданию, сигнал ошибки определяется выражением (6.2.7). Поэтому в этот момент времени управляющее воздействие П-регулятора равно
![]() (6.1.2.10)
(6.1.2.10)
Теперь остановимся на алгоритмах расчета управляющего воздействия И-регулятора. Запишем уравнение идеального непрерывного И-регулятора
 (6.1.2.11)
(6.1.2.11)
где ![]() - коэффициент передачи
И-регулятора.
- коэффициент передачи
И-регулятора.
Дифференцируя обе части уравнения (6.1.2.11), перейдем к такому уравнению И-регулятора
 (6.1.2.12)
(6.1.2.12)
С учетом выражения (6.1.2.10) запишем выражение И-регулятора для расчета переходных процессов, вызванных возмущениями по нагрузке :
![]() (6.1.2.13)
(6.1.2.13)
а также с учетом выражения (6.1.2.8) – уравнение И-регулятора для расчета переходных процессов, вызванных скачкообразными возмущениями по заданию:
![]() (6.1.2.14)
(6.1.2.14)
Для начальных (нулевых) моментов времени при скачкообразных возмущениях как по нагрузке, так и по заданию управляющее воздействие И-регулятора равно нулю.
Алгоритмы расчета управляющего воздействия ПИ-регулятора получим из дифференциального уравнения этого регулятора
 (6.1.2.15)
(6.1.2.15)
где ![]() - коэффициент передачи
регулятора;
- коэффициент передачи
регулятора;
![]() - время изодрома или время удвоения.
- время изодрома или время удвоения.
Уравнение (1.34) запишем в такой форме
или  (6.1.2.16)
(6.1.2.16)
От выражения (1.35) перейдем к общему уравнению ПИ-регулятора
![]() (6.1.2.17)
(6.1.2.17)
Учитывая выражения (6.1.2.2), а также (6.1.2.8), запишем соответственно уравнение ПИ-регулятора, для расчета переходных процессов, вызванных возмущениями по нагрузке :
![]()
![]() (6.1.2.18)
(6.1.2.18)
и уравнение ПИ-регулятора для расчета переходных процессов, вызванных скачкообразными возмущениями по заданию :
![]() (6.1.2.19)
(6.1.2.19)
В начале (нулевые) моменты времени управляющие воздействия ПИ-регулятора определяются как и для П-регулятора.
6.3 Блок схема расчетной части задач
Структура программы состоит из бесконечного цикла, в котором производится имитация работы контуров регулирования температуры под колпаком печи и регулирования соотношения топливо-воздух.

Рис.6.2.1 Блок-схема расчета ПИД-регулятора.

Рис 6.2.2 Блок-схема расчетной части.
Заключение
В данном курсовом проекте был рассмотрен вопрос автоматизации колпаковой нагревательной печи, были выбраны технологические средства для модернизации и улучшения ее работы, а так же разработана математическая модель контуров контроля и регулирования температуры под колпаком печи, расхода топлива и воздуха.
Список используемой литературы
1. «Расчет нагревательных и термических печей» ред. В.М. Тымчака 1983г.
2. «Нагрев стали в печах» В.Ф.Копытов.
3. Н.П.Свинолобов, В.Л.Бровкин «Печи черной металлургии» Учебное пособие.
4. Конспект лекций по дисциплине "Автоматизация технологических процессов и объектов черной металлургии"
5. В. Шамис. Borland C++ Builder для профессионалов.
Приложение А
Листинг программы
//---------------------------------------------------------------------------
#include <vcl.h>
#pragma hdrstop
#include <math.h>
#include "Unit1.h"
//---------------------------------------------------------------------------
#pragma package(smart_init)
#pragma resource "*.dfm"
TForm1 *Form1;
float T_r,T_m,T_k;
float T_r_z,T_m_z,T_k_z;
float F_t,F_v,F_g;
float L,D_vn,D_v;
float t,st,Kob=44,Tob=44,Td,Kr;
float Ti,D,y1,y2,y3,y4,y5,tz;
float Kob2,Tob2,Td2,Kr2;
float Ti2,D2;
float Kob3,Tob3,Td3,Kr3;
float Ti3,D3,x3[42];
float x[42],x2[42],Z1,q1,im;
float buf1[10],buf2[10],buf3[10];
int count,ct1;
double ent(float T)
{
im=-9e-08*T*T*T+0.0002*T*T+0.0346*T+8.6794;
return(im);
}
//---------------------------------------------------------------------------
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
}
//---------------------------------------------------------------------------
double pid_t (double D)
{
t=0;
// st=30;
Td=1;
Kr=0.2;
Ti=20;
y1=Kr*D;
y2=0;
y4=0;
y5=y1;
// y1=Kr*(D-x[1]);
y2=y2+Kr*Td*(x[1]-x[0])/Ti;
y4=-Kr*Td*(x[1]-x[0])/1;
y5=y1+y2+y4;
x[41]=x[40]+(Kob*y5-x[40])/Tob;
for(int i=0;i<41;i+=1)
x[i]=x[i+1];
return(x[40]);
}
double pid_Ft (double D)
{
t=0;
// st=30;
Td2=1.2;
Kr2=0.2;
Ti2=12;
y1=Kr2*D;
y2=0;
y4=0;
y5=y1;
// y1=Kr*(D-x[1]);
y2=y2+Kr2*Td2*(x2[1]-x2[0])/Ti2;
y4=-Kr2*Td2*(x2[1]-x2[0])/1;
y5=y1+y2+y4;
x2[41]=x2[40]+(Kob2*y5-x2[40])/Tob2;
for(int i=0;i<41;i+=1)
x2[i]=x2[i+1];
return(x2[40]);
}
double pid_Fv (double D)
{
t=0;
// st=30;
Td3=0.8;
Kr3=0.2;
Ti3=17;
y1=Kr3*D;
y2=0;
y4=0;
y5=y1;
// y1=Kr*(D-x[1]);
y2=y2+Kr3*Td3*(x3[1]-x3[0])/Ti3;
y4=-Kr3*Td3*(x3[1]-x3[0])/1;
y5=y1+y2+y4;
x3[41]=x3[40]+(Kob3*y5-x3[40])/Tob3;
for(int i=0;i<41;i+=1)
x3[i]=x3[i+1];
return(x3[40]);
}
void __fastcall TForm1::Button1Click(TObject *Sender)
{
Kob=5;
Tob=10;
Kob2=12;
Tob2=10;
Kob3=25;
Tob3=27;
T_m=500;
Timer1->Enabled=true;
L=StrToFloat(Edit1->Text);
D_vn=StrToFloat(Edit2->Text);
D_v=StrToFloat(Edit3->Text);
Series1->Clear();
Series2->Clear();
Series3->Clear();
Series4->Clear();
count=0;
for (int i=0;i<=41;i++)
x[i]=30;
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button2Click(TObject *Sender)
{
Timer1->Enabled=false;
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Timer1Timer(TObject *Sender)
{
T_r_z=TrackBar1->Position;
T_r=pid_t(T_r_z);
T_m=T_m+(Kob*T_r/5-T_m)/(Tob);
Series1->AddXY(count,T_r_z);
Series2->AddXY(count,T_r);
Series3->AddXY(count,T_m);
F_t=pid_Ft(T_r);
F_v=pid_Fv(F_t);
Series4->AddXY(count,F_t);
Series5->AddXY(count+2,F_v);
count+=1;
}
//---------------------------------------------------------------------------
void __fastcall TForm1::TrackBar1Change(TObject *Sender)
{
Label8->Caption=TrackBar1->Position;
}
//---------------------------------------------------------------------------
Инструкция по работе с программой и результаты работы программы.
При запуске приложения запускается главное окно программы, вид которого представлен на рисунке В.1.
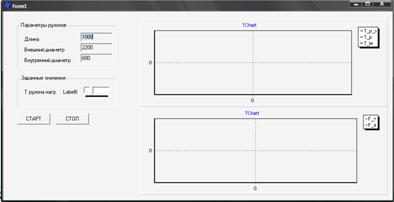
Рисунок В.1 Главное окно программы.
В левой части окна расположены управляющие кнопки , поля для ввода значений.
При нажатии на кнопку СТАРТ запускается таймер и начинает производится расчет значений температуры рулона, температуры муфеля. Изменение температур выводится на графики. На верхнем графике показаны температурные значения, а на нижнем – значения расхода топлива и воздуха. Ползунком можно менять задание, тогда на графиках становятся видны переходные процессы при ПИД регулировании.
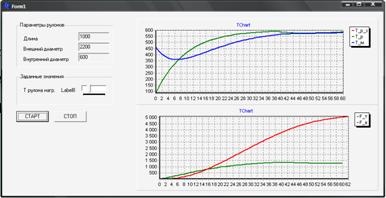
Рис. Б.2. Запуск программы.
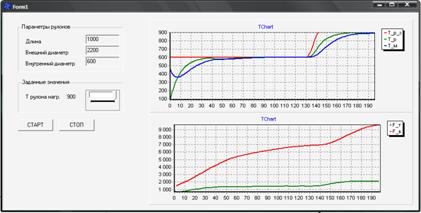
Рис.Б.3. Внешний вид при изменении задания.