
Рефераты по международному публичному праву
Рефераты по международному частному праву
Рефераты по международным отношениям
Рефераты по культуре и искусству
Рефераты по менеджменту
Рефераты по металлургии
Рефераты по муниципальному праву
Рефераты по налогообложению
Рефераты по оккультизму и уфологии
Рефераты по педагогике
Рефераты по политологии
Рефераты по праву
Биографии
Рефераты по предпринимательству
Рефераты по психологии
Рефераты по радиоэлектронике
Рефераты по риторике
Рефераты по социологии
Рефераты по статистике
Рефераты по страхованию
Рефераты по строительству
Рефераты по таможенной системе
Сочинения по литературе и русскому языку
Рефераты по теории государства и права
Рефераты по теории организации
Рефераты по теплотехнике
Рефераты по технологии
Рефераты по товароведению
Рефераты по транспорту
Рефераты по трудовому праву
Рефераты по туризму
Рефераты по уголовному праву и процессу
Рефераты по управлению
Курсовая работа: Система слежения за направлением
Курсовая работа: Система слежения за направлением
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Федеральное государственное образовательное
учреждение высшего профессионального образования
«СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
ИНСТИТУТ ИНЖЕНЕРНОЙ ФИЗИКИ И РАДИОЭЛЕКТРОНИКИ
СФУ
Кафедра «Радиотехнические системы»
КУРСОВАЯ РАБОТА
СИСТЕМА СЛЕЖЕНИЯ ЗА НАПРАВЛЕНИЕМ
Пояснительная записка
Выполнил:
студент группы РФ02-02
Н. Г Чикунова.
Проверил:
профессор кафедры РС
В. Н. Бондаренко
Красноярск 2009
Техническое задание
Для заданной структурной схемы следящей системы (рисунок 1) и моделей задающего воздействия x(t) и помехи n(t) (полагается белым шумом со спектральной плотностью N0 Вт/Гц) выполнить следующее:
1 Определить передаточные функции разомкнутой системы Kр(p), а также замкнутой системы Kз(p), спектральную плотность Nэ эквивалентных флуктуации, приведенных к входу дискриминатора.
2 Произвести оптимизацию следящей системы по параметру kи используя критерий минимума среднего квадрата ошибки; определить, оптимальное значение шумовой полосы Fш системы и минимально допустимую ошибку слежения emin; построить графики зависимостей результирующей средней квадратической ошибки слежения, а также ее составляющих (динамической и шумовой) от полосы Fш.
3 Построить логарифмические амплитудно-частотную (ЛАХ) и фазочастотную (ЛФХ) характеристики разомкнутой системы и определить по ним запас устойчивости по амплитуде и фазе при оптимальном значении параметра kи.
4 Произвести моделирование следящей системы на ЭВМ при двух типах воздействия: а) ступенчатом; б) квадратичном, построить графики переходного процесса и определить качественные показатели системы в переходном режиме (быстродействие, перерегулирование).
5 Составить функциональную схему следящей системы заданного типа (схема должна содержать функциональные элементы устройства поиска и обнаружения сигнала).
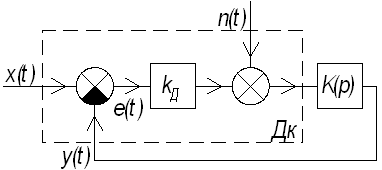
Рисунок 1 – Структурная схема следящей системы
Исходные данные
Тип следящей системы: ССН;
Задающее воздействие: Х0=0,5 [x]/c
Коэффициент передачи дискриминатора: kд = 0,075 В/град;
Спектральная плотность шума: N0 = 0,012 Вт/Гц.
Параметры динамического звена:
порядок астатизма: k = 1;
порядок звена: n = 3;
число форсирующих звеньев: m = 0;
T1 = 0,08 с;
T2 = 0,2 c;
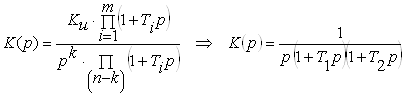
Динамическое звено имеет следующую передаточную функцию:
Область применения: цифровой следящий измеритель угловых координат моноимпульсной суммарно-разностной РЛС.
следящая система логарифмическая разомкнутая
Содержание
Содержание
Введение
1 Анализ задания
2 Определение передаточных функций разомкнутой и замкнутой систем, спектральной плотности эквивалентных флуктуаций
3 Оптимизация системы по параметру kи с использованием критерия минимума среднего квадрата ошибки
4 Анализ устойчивости автоматической системы частотным методом по критерию Найквиста
5 Компьютерное моделирование системы, нахождение переходной характеристики, оценка качества системы в переходном режиме
6 Функциональная схема цифрового следящего измерителя угловых координат моноимпульсной суммарно-разностной РЛС
Заключение
Список использованных источников
24
Введение
Неотъемлемой частью современной радиоаппаратуры являются автоматические системы. Автоматические системы встречаются практически во всех устройствах, от простых радиоприемных устройств до сложных систем спутниковой связи.
Автоматические системы решают самые различные задачи. Они позволяют более эффективно производить прием и обработку сигнала, подстройку частоты, наведение на цель, пеленгацию.
К системам автоматического управления предъявляются жесткие требования: обеспечение минимальной ошибки слежения, устойчивости, быстродействия, малого перерегулирования, простотой построения и эксплуатации. Поэтому на сегодня вопрос улучшения автоматических систем не исчерпан. Ведется поиск оптимальных параметров звеньев, схемотехнических решений, методов расчета.
Целью настоящей курсовой работы является исследование автоматической системы, закрепление знаний о автоматических системах и их характеристиках, а также поиск путей обеспечения лучших параметров, на основе полученных результатов исследования.
1 Анализ задания
В настоящей курсовой работе необходимо произвести расчет и оптимизацию автоматической системы, определить ее основные характеристики, произвести моделирование системы. К рассчитываемой системе предъявляются несколько требований:
1 минимальная ошибка слежения;
2 обеспечение требуемого запаса устойчивости;
3 высокие показатели качества системы в переходном режиме.
Для обеспечения качества переходных характеристик, участок ЛАХ разомкнутой системе вблизи частоты срез должна иметь наклон -20 дБ/дек, должен быть по возможности симметричным и иметь протяженность не менее декады /1/.
Также в курсовой работе требуется привести функциональную схему конкретной системы слежения за направлением с ее кратким описанием.
2 Определение передаточных функций разомкнутой и замкнутой систем, спектральной плотности эквивалентных флуктуаций
Коэффициент передачи разомкнутой системы:
![]() (2.1)
(2.1)
И соответственно передаточная функция замкнутой системы:
 (2.2)
(2.2)
Поскольку спектральная плотность N0 имеет размерность Вт/Гц, при переносе сумматора на вход дискриминатора необходимо брать квадрат его коэффициента передачи:
Nэ=N0/Kd2=0,012/0,005=2,4 Гц.
3 Оптимизация системы по параметру kи с использованием критерия минимума среднего квадрата ошибки
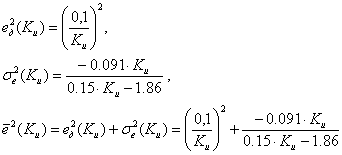
Средний квадрат ошибки находится как сумма квадрата динамической ошибки и дисперсии шумовой ошибки:
![]()
Поскольку система обладает астатизмом второго порядка и входное воздействие квадратичное, для динамической ошибки имеем:
![]()
Дисперсия шумовой ошибки находится по формуле:
![]()
где Fш – шумовая полоса замкнутой системы, которая находится по формуле:

где Kз(ω) – Модуль коэффициента передачи замкнутой системы.
Чтобы привести данный интеграл к табличному, возьмем комплексный коэффициент передачи замкнутой системы из формулы (2.2), заменив p на jω:
Kз(jw)=K(jw).kd/1+K(jw).kd
Найдем квадрат модуля путем умножения комплексного коэффициента передачи на комплексно сопряженный:

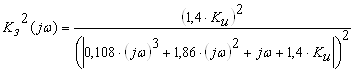
В этом случае выражение можно представить отношением полиномов:

Где полиномы:

где коэффициенты полиномов равны:
![]()
Интеграл (3.4) сводится к табличному :
![]()
где I2 равно:

Для n = 3 получаем:
 (3.8)
(3.8)
Подставив, получаем формулу для вычисления шумовой полосы:
![]() (3.9)
(3.9)
Дисперсия шумовой ошибки будет равна:
![]()
Средний квадрат результирующей ошибки:
Оптимальное значение шумовой полосы и минимально достижимую ошибку слежения находим из графика 3- зависимости ошибок слежения от полосы пропускания системы:
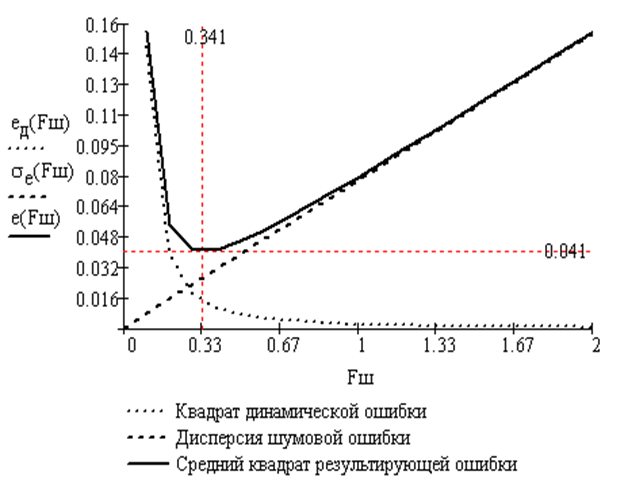
Рисунок 2 - Зависимость квадрата ошибки от
Fш: 1 - ![]() ;
;
2 - ![]() ;
3 -
;
3 - ![]()
Оптимальное значение шумовой полосы Fш = 0.341
Минимально достижимая ошибка слежения еmin = 0.041 (рис. 2)
Kuopt=0,903
4. Анализ устойчивости автоматической системы частотным методом по критерию Найквиста
Для оценки запаса устойчивости системы найдем и построим ЛАХ и ЛФХ разомкнутой системы, выразив их из формулы (2.2) передаточной функции. Найдем комплексный коэффициент передачи разомкнутой системы:
![]() (4.1)
(4.1)
Из этой формулы выразим АЧХ и ФЧХ:
для упрощения эту АЧХ можно разбить на три составляющие
![]() ,
,
где АЧХ интегрирующего звена
![]()
и АЧХ инерционных звеньев
![]() .
.
ФЧХ интегрирующего звена:
![]() . ФЧХ инерционного звена:
. ФЧХ инерционного звена:
![]() .
.
ФЧХ разомкнутой следящей системы:
![]()
Построим ЛАХ и ЛФХ исследуемой системы:
ЛАХ инерционного звена:
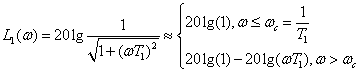 ;
;
где![]() - частота сопряжения.
- частота сопряжения.

ЛАХ интегрирующего звена
: ![]() ;
;
Общую ЛАХ исследуемой системы можно определить как
![]() .
.
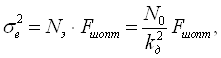
Графики ЛАХ и ЛФХ представлены на рис.4
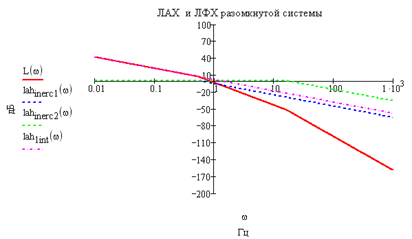
Рисунок 3 - График зависимости ЛАХ разомкнутой системы
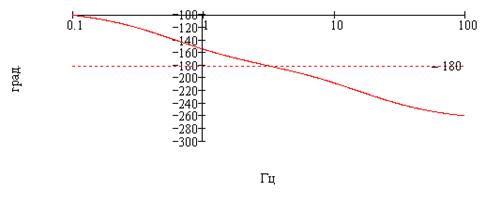
Рисунок 4 - График зависимости ЛФХ разомкнутой системы
Запас по фазе неудовлетворительный т.к. характеристика пересекается с нулем по асимтоте -40дб/дек , поэтому изменим Кu, для обеспечения запаса по устойчивости.
Определяя запас устойчивости системы, мы увидим, что по усилению система абсолютно устойчива. Так кА ФЧХ системы асимптотически стремится к уровню -180 градусов.
А вот запас устойчивости
по фазе не является достаточным. Т.к. ЛАХ пересекает 0 на ![]() , значение ФЧХ на этой
частоте
, значение ФЧХ на этой
частоте ![]() Град. Что не удовлетворяет
условию достаточной системы
Град. Что не удовлетворяет
условию достаточной системы ![]() .
.
Для обеспечения запаса
устойчивости системы и для уменьшения перерегулирования, т.е. пересечения ЛАХ
разомкнутой системы с осью абсцисс ![]() , было при наклоне -20дБ/дек,
(установлено, что колебательность переходного процесса будет наименьшей, если
, было при наклоне -20дБ/дек,
(установлено, что колебательность переходного процесса будет наименьшей, если ![]() разомкнутой системы находится на
участке ЛАХ с наклоном -20дБ/дек), уменьшим
разомкнутой системы находится на
участке ЛАХ с наклоном -20дБ/дек), уменьшим ![]() до величины Кu опт =0,35. Это значение было выбрано
из условия
до величины Кu опт =0,35. Это значение было выбрано
из условия ![]() т.к качество переходного процесса
определяется главным образом участком ЛАХ с наклоном -20дБ/дек, который должен
иметь протяженность не менее декады.
т.к качество переходного процесса
определяется главным образом участком ЛАХ с наклоном -20дБ/дек, который должен
иметь протяженность не менее декады.
Оценим значения шумовой
полосы и результирующей ошибки слежения, при новом значении ![]()
![]() ,
,
![]()
![]()

![]() …Гц
…Гц
![]()
![]()
![]() 0,103
0,103
Графики ЛАХ и ЛФХ разомкнутой системы при новом значении Ku
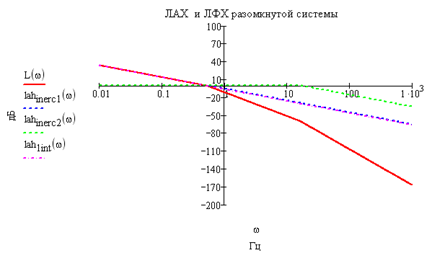
Рисунок 5 - График зависимости ЛАХ разомкнутой системы
Рисунок 6 - График зависимости ЛФХ разомкнутой системы
5. Компьютерное моделирование системы, нахождение переходной характеристики, оценка качества системы в переходном режиме
Для цифрового моделирования системы воспользуемся аппаратом Z-преобразования. Для этого непрерывное интегрирование заменим дискретным по методу прямоугольников:
![]() (5.1)
(5.1)
где T – интервал дискретизации, который выбирается согласно теореме Котельникова.
Получим Z-преобразование от передаточной функции:
 ;
;
Этой передаточной функции соответствует уравнение:
 .
.
Для исследуемой системы передаточная функция замкнутой системы равна:
![]() .
.
Тогда дискретная передаточная функция для ошибки будет равна:

где ![]() - шаг дискретизации,
- шаг дискретизации, ![]() .с
.с
Делая замену ![]() , произведем преобразования:
, произведем преобразования:

![]()
 ,
,
где ![]() - добротность системы
- добротность системы
Сравнивая с  , находим коэффициенты разностного
уравнения:
, находим коэффициенты разностного
уравнения:
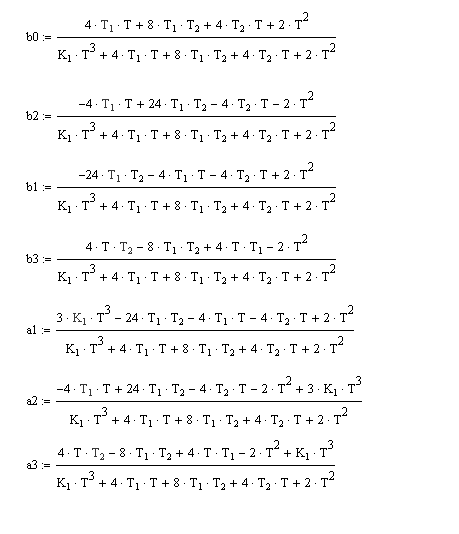
Этой передаточной функции соответствует разностное уравнение:
![]()
где b0 =0.99, b1=-1.25, b2=-0.16, b3=0.42, a1=-1.2, a2=-0.14, a3=0.43.
Качественные показатели
переходного процесса (быстродействие, перерегулирование) определяется по
графику зависимости ![]() (
(![]() -
дискретное время кратное интервалу
-
дискретное время кратное интервалу ![]() дискретизации). Быстродействие
оценивается временем переходного процесса
дискретизации). Быстродействие
оценивается временем переходного процесса ![]() (время, в течение которого ошибка
уменьшается по абсолютной величине до значения 0.01), а перерегулирование –
величина максимального выброса
(время, в течение которого ошибка
уменьшается по абсолютной величине до значения 0.01), а перерегулирование –
величина максимального выброса ![]() в переходной характеристике.
в переходной характеристике.
Построим отклик системы
на единичное ступенчатое воздействие (![]() , где
, где ![]() )
)
|
|
|
|
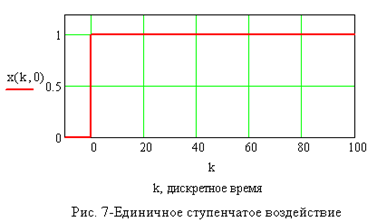
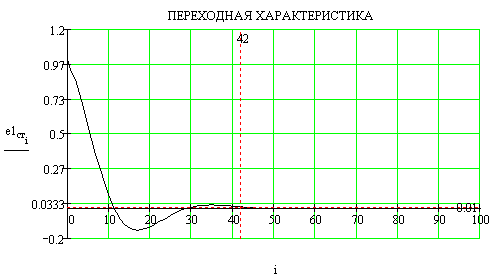
Рисунок 8 – Переходная характеристика
Как видно из графика
перерегулирование системы равно ![]() , а время переходного процесса
(быстродействие) будет равно
, а время переходного процесса
(быстродействие) будет равно ![]() с
с
Построим отклик системы
на линейное воздействие (![]() ,
, ![]() )
)
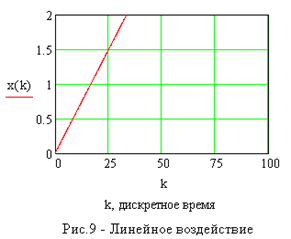
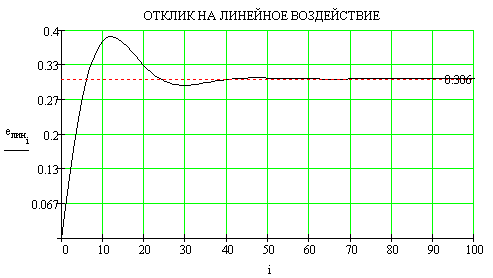
Рисунок 10 –Отклик на линейное воздействие
Из графика видно, что характеристика стремится к значению 0.306 мкс, которое соответствует динамической ошибке системы.
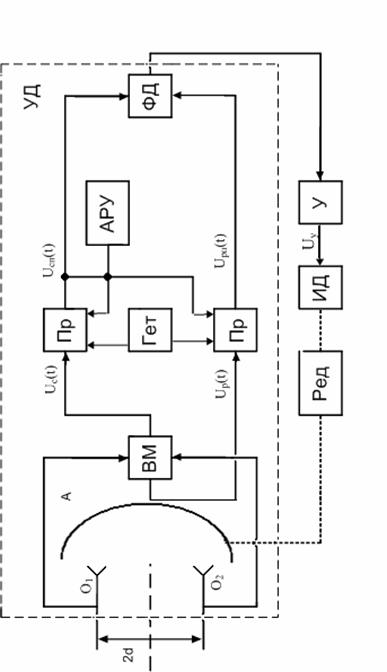
6 Функциональная схема цифрового следящего измерителя угловых координат моноимпульсной суммарно-разностной РЛС
 |
|||
 |
|||
Заключение
При выполнении данной курсовой работы был произведен расчет автоматической системы.
Оптимальное значение шумовой полосы системы:
Fшopt = 0,397 Гц.
Минимально допустимая ошибка слежения:
emin = 0,041 град.
Система имеет запас устойчивости по фазе, равный:
Δφ = 46,30, что удовлетворяет условию устойчивости.
В переходном режиме система имеет следующие качественные показатели:
Быстродействие – время переходного процесса tп = 16,6 с;
еmax = 0,091
Принятый сигнал с выходов облучателей О1 и О2 поступает на волноводный мост(ВМ). Где формируются суммарный uc(t) и разностный up(t) сигналы. Каждый из них обрабатывается своим приемником (Пр.). Система АРУ работает по сигналу суммарного сигнала. Она стабилизирует амплитуду колебаний на выходе каждого сигнала (выход УПЧ приемника) на определенном уровне, при изменении амплитуды принятого сигнала в широких пределах. Колебания с выходов приемника обоих каналов поступают на фазовый детектор (ФД). На выходе ФД формируется постоянное напряжение, величина которого определяется значением углового рассогласования, а полярность - его знаком. Это напряжение усиливается, и поступает в цепь управления исполнительным двигателем (ИД). Под действием управляющего напряжения ротор двигателя начинает вращаться и через редуктор поворачивает отражатель антенны в сторону уменьшения рассогласования.
В установившемся режиме антенна ориентируется так, что равносигнальное направление (РСН) совпадает с направлением на источник сигнала. Измеряемый пеленг отсчитывается по углу поворота антенны, относительно её платформы.
Список использованных источников
1 Бондаренко, В. Н. Основы автоматики: учебное пособие / В. Н. Бондаренко. – Красноярск : ИПЦ КГТУ, 2004. – 155 с.: ил.
2 Первачев, С. В. Радиоавтоматика: учебник для вузов / С. В. Первачев. – М.: Радио и связь, 1982. – 296 с.: ил.
3 Гоноровский И. С. Радиотехнические цепи и сигналы / И. С. Гоноровский. – М.: Радио и связь, 1986. – 512 с.: ил.
4 Коновалов, Г. Ф. Радиоавтоматика: учебник для вузов по спец. «Радиотехника» / Г. Ф. Коновалов. – М.: Высшая школа, 1990. – 335 с.: ил.