
Рефераты по международному публичному праву
Рефераты по международному частному праву
Рефераты по международным отношениям
Рефераты по культуре и искусству
Рефераты по менеджменту
Рефераты по металлургии
Рефераты по муниципальному праву
Рефераты по налогообложению
Рефераты по оккультизму и уфологии
Рефераты по педагогике
Рефераты по политологии
Рефераты по праву
Биографии
Рефераты по предпринимательству
Рефераты по психологии
Рефераты по радиоэлектронике
Рефераты по риторике
Рефераты по социологии
Рефераты по статистике
Рефераты по страхованию
Рефераты по строительству
Рефераты по таможенной системе
Сочинения по литературе и русскому языку
Рефераты по теории государства и права
Рефераты по теории организации
Рефераты по теплотехнике
Рефераты по технологии
Рефераты по товароведению
Рефераты по транспорту
Рефераты по трудовому праву
Рефераты по туризму
Рефераты по уголовному праву и процессу
Рефераты по управлению
Дипломная работа: Исследование и разработка САР скорости ленты конвейера КЛ5250 для экскаватора ЭРШР Д 5250
Дипломная работа: Исследование и разработка САР скорости ленты конвейера КЛ5250 для экскаватора ЭРШР Д 5250
Исследование и разработка САР скорости ленты конвейера КЛ5250 для экскаватора ЭРШР Д 5250
1. ИССЛЕДОВАНИЕ ПРИНЦИПОВ УПРАВЛЕНИЯ КОНВЕЙЕРАМИ
1.1 Требования к конвейерному транспорту, грузопотоки, область применения, характеристики грузов
Эксплуатация ленточных конвейеров на горных предприятиях (в шахтах и на карьерах) связана с часто изменяющимися горно-геологическими условиями, чем определяются особые требования, предъявляемые к конструкциям этих конвейеров.
Грузопотоки на горных предприятиях характеризуются значительной неравномерностью. В связи с этим приемная способность конвейеров должна соответствовать поступающим максимальным минутным грузопотокам. В последние годы выполнены исследования по определению характеристик грузопотоков на угольных шахтах, калийных рудниках и железорудных карьерах. Для обеспечения современных шахтных и карьерных грузопотоков отечественной промышленностью выпускаются конвейеры производительностью до 5000-6000 м3/ч, что до последнего времени в основном соответствовало требованиям современного горного производства.
Длина конвейерных линий в масштабах горных предприятий при современных средствах автоматизации и контроля за состоянием конвейеров практически может быть весьма значительной. На горных предприятиях СНГ эксплуатируются конвейерные линии длиной 10 км и более, а в мировой практике известны конвейерные линии длиной до 100 км. Оценивая современные темпы повышения мощности шахт и карьеров, можно предвидеть, что в самое ближайшее время потребуются конвейеры производительностью до 10000 м3/ч для шахт и до 20000 м3/ч для карьеров. Мощность приводов таких конвейеров будет достигать 10000 кВт.
Особые требования предъявляются к надежности работы отдельных конвейеров и конвейерных линий в целом. Это требование усугубляется еще и тем, что конвейерные линии, как правило, относятся к нерезервируемым системам, так как установка резервной конвейерной линии настолько повышает капитальные затраты, что по сравнению с другими вариантами транспорта конвейерный транспорт, при прочих равных условиях, в ряде случаев становится менее рентабельным.
Надежность работы конвейеров определяется главным образом продлением сроков наиболее быстро изнашиваемых элементов конвейера, к которым относятся ролики и конвейерная лента, а также такими факторами эксплуатационного характера, как устойчивость движения конвейерной ленты и качество ее очистки от налипающего транспортируемого груза. Надежность работы конвейерных линий, помимо указанных выше факторов, определяется также рациональным устройством перегрузочных пунктов. К основным факторам, влияющим на надежность работы ленточных конвейеров, следует также отнести отказы электрооборудования и систем управления конвейерами и конвейерными линиями.
Повышение срока службы подшипниковых узлов конвейерных роликов достигается применением роликов с долговременной смазкой, которые работают практически без ремонта. Имеются примеры безремонтной эксплуатации роликов конструкции УкрНИИпроекта в течение 7 лет. До настоящего времени не вполне решен вопрос повышения долговечности корпуса роликов, особенно при транспортировании грузов, включающих крупные куски и обладающих абразивными свойствами.
Долговечность конвейерных лент в наибольшей степени зависит от свойств транспортируемого груза и от уровня динамических нагрузок, которые она испытывает в загрузочном пункте и при движении с грузом по роликоопорам, а также от соблюдения правил эксплуатации лент. Современные конвейерные ленты с основой из высокопрочных синтетических тканей и с тросовой основой при обеспечении постоянного профилактического ухода за ними имеют довольно высокий срок службы, особенно при эксплуатации на конвейерах с податливыми роликоопорами. Считается, что при перемещении рыхлых некрупнокусковых грузов срок службы лент с основой из синтетических тканей должен составлять не меньше 5-6 лет, а с тросовой основой 10 лет и больше. При перемещении скальных грузов, особенно крупнокусковых, срок службы лент уменьшается почти вдвое. Дальнейшее повышение долговечности конвейерных лент является наиболее важной задачей при решении вопросов повышения эффективности конвейерного транспорта.
Для угольных шахт важным требованием является обеспечение огнестойкости конвейерных лент для всех типов подземных конвейеров.
Несмотря на большое разнообразие типов и конструкций загрузочных и перегрузочных устройств, все они, как показывает опыт эксплуатации, удовлетворительно работают при перемещении рыхлых пород, не склонных к налипанию. Для скальных крупнокусковых грузов, а также для рыхлых влажных пород со скальными включениями до настоящего времени не создано удовлетворительно работающих загрузочных и перегрузочных устройств.
Ленточным конвейерам свойственны ограничения по роду транспортируемого груза и в особенности по его кусковатости. Обычными ленточными конвейерами производится перемещение насыпных грузов крупностью до 300 мм или несколько большей (для нетяжелых грузов). Наиболее эффективно осуществляется транспортирование сухих, слабоувлажненных пород средней крепости, не склонных к налипанию на конвейерную ленту. К таким породам относятся уголь, сухие известняки, сухие суглинки, песчано-глинистые смеси. Достаточно эффективно ленточными конвейерами можно перемещать дробленые скальные породы и руды. Использование конвейеров с шарнирно-подвесными роликоопорами и канатным ставом позволяет применять конвейерный транспорт для перемещения скальных грузов крупностью до 500-600 мм, а применение конвейеров на ходовых опорах (ленточно-тележечных) обеспечивает перемещение скальных грузов практически любой крупности.
Условием эффективного применения ленточных конвейеров является прямолинейность их трассы в плане, что особенно трудно выполнимо в подземных выработках.
В последние годы накоплен некоторый опыт, доказывающий возможность изгиба обычного ленточного конвейера по большим радиусам (не меньше 150-200 м) путем соответствующей установки роликоопор, препятствующих сбеганию конвейерной ленты при изгибе става. Однако для подземных условий такие радиусы изгиба бывают обычно слишком велики. В настоящее время ведутся работы по созданию устройств, обеспечивающих движение конвейерной ленты по значительно меньшим радиусам.
Угол наклона трассы ленточного конвейера зависит от силы сцепления транспортируемого груза с конвейерной лентой и от угла естественного откоса груза на движущейся ленте. На обычных ленточных конвейерах уголь удерживается при углах наклона конвейера до 18°. Глинистые и песчано-глинистые породы, известняки, обладающие более высоким коэффициентом сцепления с конвейерной лентой, допускают угол наклона конвейера до 20°.
Для расширения области применения конвейерного транспорта и повышения его эффективности проводятся работы по созданию конвейеров, способных перемещать насыпные грузы при углах наклона более 20°. Прошли промышленные испытания конвейеры ЗЛН100 с лентой, имеющей поперечные выступы. Этот конвейер может перемещать уголь при углах наклона конвейера до 27°. В течение нескольких лет на поверхности шахты № 5 «Великомостовская» (Львовско-Волынский бассейн) эксплуатируется двухленточный конвейер, который может перемещать уголь при угле наклона установки более 35°, а на шахте «Пронская» (Подмосковный бассейн) прошел испытания вертикальный двухленточный конвейер. Работы по подготовке выпуска крутонаклонных конвейеров продолжаются.
При установлении эффективной области применения конвейерного транспорта обычно решается технико-экономическая задача по определению минимума приведенных затрат различных принципиально возможных вариантов транспорта для данных конкретных условий горного производства. На основе многократно решавшихся задач такого типа установлена эффективная область применения конвейерного транспорта при подземной разработке угольных месторождений. К этой области относятся горизонтальные и пологие пласты средней мощности с углами падения до 18°. Создание крутонаклонных конвейеров позволит расширить область применения конвейерного транспорта на наклонные пласты с углами падения до 35° и выше.
На рудных шахтах большой производительности, добывающих крепкие руды, применение конвейерного транспорта эффективно в наклонных стволах, на которые руда поступает после дробления. В последнее время накоплен положительный опыт по применению ленточных конвейеров на ходовых опорах (ленточно-тележечных) в качестве доставочного средства по выемочным, а в дальнейшем и по магистральным выработкам рудных шахт, разрабатывающих рудные залежи большой мощности. Эффективное использование конвейерного транспорта на рудных шахтах позволит повысить концентрацию горных работ.
Применение конвейерного транспорта на открытых разработках непрерывно возрастает. На открытых разработках некоторых зарубежных стран (ПНР, ФРГ и др.) объем перевозок горной массы конвейерным транспортом достигает 50 % и более. В СНГ доля перевозок, приходящихся на карьерный конвейерный транспорт, пока незначительна, однако в настоящее время в проектах новых угольных и рудных карьеров все чаще предусматривается конвейерный транспорт. В ближайшее время предполагается создать конвейерные комплексы протяженностью в несколько десятков километров для доставки полезного ископаемого от карьера непосредственно к потребителю.
Эффективность применения конвейерного транспорта, как правило, зависит от типа конвейера, входящего в транспортный комплекс. Из существующих типов наибольшее распространение получили ленточные конвейеры традиционной конструкции и значительно меньшее — ленточно-канатные. В ближайшие годы предполагается использование ленточных конвейеров с промежуточными приводами, ленточно-тележечных конвейеров и других.
В ИГД Минчермета выполнена работа по установлению эффективной области применения конвейерных комплексов, состоящих из конвейеров различного типа. Критерием эффективности принят минимум приведенных затрат. Методика предусматривает при выборе параметров принимаемых конвейеров оптимизацию типа конвейерной ленты и ее ширины, типа привода и перегрузочных узлов. Методика учитывает также такие факторы, как неравномерность поступающего на конвейер грузопотока, степень долговечности конвейерной ленты и надежность оборудования, входящего в состав конвейерного комплекса.
В результате анализа различных вариантов конвейерного транспорта по указанной методике была выявлена рациональная область применения конвейеров различного типа. По этим данным ленточные конвейеры обычной конструкции оказалось наиболее рационально использовать при наклонных трассах, производительностях свыше 4000 т/ч и расстояниях транспортирования около 3000-4000 м. При больших расстояниях целесообразно применение хвостовых и промежуточных приводов.
Ленточные конвейеры с канатным ставом оказываются эффективнее ленточных на горизонтальных трассах большой протяженности и грузопотоках до 4000 т/ч или при слабонаклонных трассах и грузопотоках до 2000 т/ч. При этих условиях лента имеет меньшую стоимость, а срок ее службы будет выше. Кроме того, ленточные конвейеры с канатным ставом отличаются меньшей металлоемкостью става. Типовая секция ленточного конвейера с канатным ставом приведена на рисунке 1.1.
Ленточные конвейеры с канатным ставом и с подвесными роликоопорами (рис. 1.1) представляет собой два параллельно натянутых каната 1, опирающихся на стойки 2; на канат на определенном расстоянии друг от друга навешиваются роликоопоры грузовой ветви 3, роликоопоры порожняковой ветви 4, как правило, крепятся на опорных стойках 2.
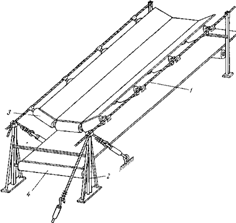
Рисунок 1.1 Ленточный конвейер с канатным ставом
Конвейер с канатным ставом малогабаритен, легок, имеет небольшую стоимость; особенно удобен в подземных условиях. Благодаря своей конструкции он легко позволяет устанавливать различное количество роликоопор на единицу длины. Для предотвращения чрезмерного сближения канатов между ними иногда устанавливают поперечные распорные рамки.
Конструкция става во многом определяется техническими характеристиками конвейера: скоростью и устойчивостью движения ленты, величиной динамических нагрузок на опорные стойки и т. д. Конвейер с подвесными роликоопорами является колебательной системой с определенной частотой собственных колебаний. При определенных нагрузках и скоростях транспортирования частота вынужденных колебаний может совпасть с частотой собственных колебаний конвейера, и вся система входит в резонанс. Это может вызвать значительные колебания ленты, канатов, опорных стоек.
В зависимости от свойств транспортируемого груза, скорости ленты и характеристики загрузочного устройства меняется величина динамической нагрузки на роликоопоры линейных и загрузочных секций. При погрузке и транспортировании мелкокусковых насыпных грузов нагрузки на роликоопоры в загрузочном устройстве превышают нагрузки на роликоопоры линейных секций в 1,25-1,5 раза, а при погрузке крупнокусковых грузов — в 10-20 раз. Так, при погрузке крупных кусков динамическая нагрузка в месте удара куска может достигать 50-100 кН при длительности действия 0,001-0,05 с; на линейных секциях эти нагрузки составляют в среднем 5-8 кН при длительности 0,05-0,2 с. Для мелкокусковых грузов роликоопоры в местах загрузки и роликоопоры линейных секций конструктивно практически не отличаются, тогда как для крупнокусковых грузов требуются принципиально отличные конструктивные решения.
Многоприводные ленточные конвейеры с фрикционными промежуточными приводами иногда целесообразно использовать на наклонных (выше 9°) трассах длиной 3000 м и больше, так как в этих условиях увеличение капитальных затрат на устройство промежуточных приводов и затрат на саму конвейерную ленту компенсируется более высокой надежностью конвейерной установки, не имеющей промежуточных перегрузочных пунктов.
Ленточно-тележечные конвейеры на горизонтальных трассах при производительностях более 2000 т/ч оказываются более экономичными, чем обычные ленточные конвейеры, благодаря тому, что срок службы их ленты выше, чем у ленточных, а энергоемкость ниже вследствие более низкого коэффициента сопротивления движению.
При углах наклона трассы до 9° и крупнокусковых грузах ленточно-тележечные конвейеры оказываются эффективнее ленточных при расстояниях до 5000 м, а при углах наклона трассы 18° — до 3000 м. При больших длинах конвейерные комплексы, состоящие из ленточно-тележечных конвейеров, приходится оборудовать довольно сложными перегрузочными устройствами, установка и эксплуатация которых связана с затратами, превышающими затраты на дробление горной массы, которое необходимо при обычных ленточных конвейерах.
По мере совершенствования конструкций конвейеров и технологии применения конвейерного транспорта границы эффективного использования различных типов конвейеров могут изменяться.
1.2 Обоснование выбранного направления
Задачи, решаемые, при проектировании систем управления конвейерными линиями сходятся к созданию безопасных, ремонтопригодных, высоконадежных и высокопроизводительных линий с минимальным использованием ручного труда.
В настоящее время задача проектирования высокопроизводительных конвейерных линий решена и на повестку дня ставится вопрос о рациональном использовании имеющихся мощностей. При решении задачи рационального использования конвейерного транспорта без увеличения существующих мощностей необходимо оценить воздействия комплекса мероприятий (технических, технологических, управленческих, организационных).
Основными мероприятиями принято считать выбор и определение технических и технологических параметров, а режимы организации и управления рассматриваются либо как подчиненные им, либо во внимание не принимаются. В то же время последние оказывают свое влияние на процесс транспортирования, и поэтому следует рассматривать этот процесс в комплексе. Комплексная оценка и выбор рационального режима транспортирования горной массы - задача многозвенная, учитывающая больное количество параметров взаимосвязанных друг с другом.
Задачей настоящего этапа является исследование принципов управления конвейерами тракта, учитывающих технические, технологические и организационные факторы транспортирования конвейерами.
1.3 Анализ существующих критериев управления конвейерными линиями
В литературе приводятся ряд критериев управления конвейерными линиями, используемыми при добыче угля подземным способом. Главной задачей системы оптимального автоматического управления определяется задача предельного снижения ограничивающего влияния режимов работы конвейерной линии на производительность забоя. Отсюда главный критерий для этих систем формулируется в следующем виде: "Предельное снижение времени простоя добычных участков по причине отказов конвейерной линии или отказов на выходе конвейерной линии".
Помимо этой задачи, существует другая задача системы оптимального автоматического управления конвейерными линиями, которая формулируется как предельное снижение эксплуатационных затрат на единицу веса транспортируемого груза.
Критерии для указанной задачи формулируются следующим образом:
· минимальный расход электроэнергии на транспортирование единицы веса груза (минимальные удельные энергозатраты);
· минимальный износ материальной части конвейера на транспортирование единицы веса груза (минимальный удельный износ).
Следует отметить, что предлагаемые авторами критерии управления не отвечают самому главному требованию и не учтены взаимовлияния этих критериев друг на друга. Таким образом, не производится оценки выбора критерия отвечающему требованию рационального критерия в каждый конкретно взятый момент времени. Кроме того, методы, используемые при решении поставленных задач, не приемлемы для решения задач автоматизации конвейерных линий роторных комплексов открытых горных работ. Так, например, главный критерий управления решается при использовании аккумулирующей способности конвейерной линии, переводом грузопотока из аварийного участка на менее загруженный. Т.е. используется тот факт, что шахтные конвейерные линии в своем большинстве разветвленные, и, таким образом, есть возможность, используя технологические решения, предельно снизить время простоя добычных участков по причине отказов конвейерной линии. Формулируются две задачи управления для подсистемы АСУ конвейерным транспортом: управление грузопотоком и управление пуском и остановкой конвейерных линий.
Обе эти задачи подчиняются одной цели - получения минимальной себестоимости транспортирования. Первая задача решается путём введения комбинированного управления с использованием системы бункер - регулируемый конвейер. Применение бункера в такой системе позволит уменьшить глубину регулирования скорости, а регулируемый конвейер позволит принимать меньший объем бункера по сравнению с вариантом нерегулируемого конвейера.
Управление пуском и остановкой конвейерных линий производится с учетом количества груза, лежащего на конвейере. Однако в этой работе, как и в предыдущей критерий управления конвейерной линией не является рациональным, т.к. предложенные критерии не оценивают взаимовлияние их между собой. Другие критерии не приняты во внимание, так, например, не оценен критерий обеспечения надежности работы конвейерной линии.
Наиболее полно оценены критерии управления ,где выделяют пять основных критериев управлении конвейерным транспортом, которые учитывают технические, технологические, организационные и управленческие направления.
1. Обеспечение максимальной вероятности безопасной работы транспорта.
2. Минимизация доли ручных операций в процессе управления.
3. Обеспечение максимальной функциональной надежности. Это возможно за счет сокращения простоев добычных механизмов, связанных с организацией работы транспорта, а также с возникновением неисправностей. Это обеспечивается следующими мероприятиями: контроль за непревышением фактической загрузки конвейера; устранение просыпания угля на конвейере путем контроля за непревышением фактической величины грузопотока; введение регулируемого торможения для снижения аварийности перегрузочных пунктов, имеющие место при остановке конвейерной линии из-за равности времени выбега конвейеров; введение регулируемого запуска конвейеров в линии, сокращающее время запуска.
4. Обеспечение максимальной эксплуатационной надежности конвейеров. Под этим следует понимать максимальное использование конвейеров во времени за счет снижения холостых пробегов ленты и обеспечения непрерывности грузопотоков. Задача решается путем регулирования моментов пуска-останова конвейеров. Кроме того, в это понятие входит максимальное использование конвейеров по производительности путем стабилизации погонной нагрузки и приближения ее к номинальной. Решение задачи возможно двумя путями: использование регулируемого привода и введение усреднительного бункера. При этом объем этого бункера должен быть оптимальным, т.е. позволяющим сглаживать мгновенные пиковые нагрузки и аккумулировать определенную часть груза, и, в то же время, не быть громоздким.
5. Обеспечение минимального расхода материальных ресурсов достигается за счет увеличения срока службы ленты, роликов, футеровки барабанов и других запасных частей, а также снижение потребляемой электроэнергии.
Нетрудно заметить, что эти критерии тесно взаимосвязаны. Так, например, обеспечение минимального расхода материалов исходит из увеличения срока службы отдельных частей конвейера, а это, в свою очередь способствует снижению времени простоев при поломке оборудования, что приводит к увеличению эксплуатационной производительности конвейерной линии. В общем виде указанная задача выбора параметров системы конвейерного транспорта сводится к установлению их рационального соотношения, обеспечивающего наименьшие приведенные затраты на транспортирование при надежной реализации плановой нагрузки на забои. В математической форме функция цели имеет вид:
С ( Ск, Сэ, П, Рг, Рд, Рт, Км, Кс, Ро, Ру) ® min;
Q ( П, Рг, Рд, Рт, Км, Кс, Ро, Ру) ³ Q*,
где С - функция приведенных затрат;
Q, Q* - функция суммарной нагрузки на добычной конвейерный участок и её плановая величина;
Ск, Сэ - составляющие приведенных затрат, зависящие от капитальных и эксплуатационных затрат на систему конвейерного транспорта в целом;
П - функция потери добычи по конвейерному добычному участку;
Рг = (Рг1, Рг2, ... Ргn) - совокупность горнотехнических параметров;
Рд = (Рд1, Рд2, ... Рдn) - совокупность параметров добычного оборудования;
Рт=(Рт1, Рт2 ... Ртn) - совокупность параметров, характеризующих работу смежных транспортных звеньев;
Км= (Км1, Км2, ... Кмn) - совокупность технических параметров транспортных средств;
Кс = (Kc1, Kc2, ... Ксn) - совокупность технологических параметров транспортных схем;
Ро, Ру - принятые режимы организации и управления транспортными звеньями.
1.4 Разработка критериев управления линией
Управление конвейерным транспортом представляет собою процесс, характеризующийся многими параметрами, оказывающими взаимовлияние друг на друга. Для получения рационального режима управления конвейерной линией необходимо выделять параметры, оказывающие влияние на её режимы работы, оценить взаимовлияние этих параметров друг на друга. Рациональным режимом управления будем называть режим, обеспечивающий плановую производительность транспортирования с наименьшими затратами на единицу транспортируемого груза.
1.4.1 Анализ причин потерь производительности
На производительность конвейерной линии оказывают влияние потери транспортируемого материала. Причины, вызывающие эти потери следующие.
При пересыпании груза выше борта конвейерной ленты возникают просыпи, которые можно исключить, проведя ряд мероприятий. Например, установка датчиков, определяющих объем груза, находящегося на ленте. Для исключения пересыпания груза возможно применение дозатора, дозирующего порцию груза с учетом характеристик поступающейй горной массы, ограничивающего объем последней на конвейерной ленте.
Вторая причина оказывающая влияние на потери – это засыпание перегрузочных узлов при пусках и остановках. Для исключения этого негативного явления необходимо производить регулируемый пуск и торможение, обеспечивающие при этом еще и минимальную длительность этого процесса с формированием оптимальных динамических усилий.
Сокращение времени на текущий и аварийный ремонты, на поиск аварийного узла, на ликвидацию аварии, а также сокращение времени пусков и торможений открывает дополнительный резерв увеличения времени эксплуатации конвейерной линии.
Оценка аварийных ситуаций позволит выявить “узкие места” в конвейерной линии, усовершенствовать график планово-предупредительных ремонтов и тем самым увеличить надежность работы конвейерной линии.
При решении вопроса сокращения длительности пуска и останова целесообразно предусмотреть индивидуальную программу разгона каждого конвейера в линии, которая бы, исходя из условия исключения засыпания перегрузочных узлов, учитывала сложившуюся технологическую ситуацию (распределение груза по конвейерам линии, степень загруженности каждого из конвейеров). Программа должна включать в себя очередность пуска (торможения) конвейеров, интенсивность пуска (торможения). Все эти операции должны быть направлены на сокращение времени пуска (торможения) с динамическими режимами, обеспечивающими максимально-возможный срок службы составных элементов конвейера, и минимальный расход электроэнергиии. Снижение времени на поиск аварийной ситуации производится зa счет введения в систему управления узла, определяющего номер неисправности. Для более оперативного обслуживания систем управления каждого из конвейеров и системы управления конвейерной линии в целом целесообразно разрабатывать и применять модульные системы с достаточным запасом ЗИПа. Неисправные элементы, которые подлежат замене в централизованном порядке ремонтируются специальными службами или подлежат замене на заводе-изготовителе.
1.4.2 Оценка режимов работы линии
Режимы работы конвейерной линии зависят от горнотехнических параметров поступающих материалов.
При крупнокусковых грузах целесообразно снижать скорость его транспортирования. При этом увеличивается срок службы ленты, роликов, возможно решение вопроса снижения металлоемкости конвейера. Однако, при снижения скорости транспортирования снижается производительность. Следовательно, следует оценить уровень снижения скорости. увеличение срока службы элементов и снижение металлоемкости конвейера, являющиеся следствием снижения скорости и потери производительности при этом. В этом случае возможен выбор оптимального режима, т.к. увеличение срока службы элементов конвейера создает предпосылки для увеличения надежности конвейерной линии, следовательно увеличение времени эксплуатации линии. В общем случае, при достижении оптимального режима в этом случае производительность не снижается, а становится стабильной на протяжении всего срока эксплуатации.
На величину себестоимости оказывают влияние технические параметры конвейеров.
Это стоимостные и массо-габаритные показатели привода и системы управления. Надежность работы систем управления и привода, которые в конечном итоге оказывают влияние на длительность времени эксплуатации конвейеров в линии. Одним из методов повышения надежной работы систем управления конвейерной линией является резервирование. В двухуровневых системах управления это возможно за счет дублирования алгоритмов регулирования, управления конвейером в системе управления линией.
Для получения рационального режима конвейерной линии следует обеспечить оптимальный режим работы каждого отдельного конвейера в линии. Оптимальным режимом работы отдельного конвейера в линии будем называть режим, обеспечивающий минимальные затраты при изменяющихся параметрах конвейера, уровень загрузки, уровень скорости, уровень натяжения, распределение тяговых усилий между приводными барабанами, степень взаимовлияния барабанов в многоприводных конвейерных установках. Кроме этого в этот режим включаются программы разгона и торможения в зависимости от степени загрузки конвейера и с учетом корректировки, поступающей из системы управления конвейерной линии при отработке рационального критерия управления конвейерной линией.
1.4.3 Создание оптимального критерия управления
Для создания рационального критерия управления конвейерной линией следует учитывать влияние технологических параметров транспортных схем.
Карьерные конвейерные линии в большинстве своем представляют неразветвленные системы конвейеров, расположенные последовательно друг за другом. Поэтому особо остро в таких системах встает вопрос обеспечения высоконадежных технологических схем, т.к. при существующих производительностях конвейерных линий остановка по причине аварии обуславливает ничем невосполнимые потери в добыче или снижение интенсивности снятия вскрыши. Рассматривают два пути повышения надежности таких технологических схем. Первый - это на основании статистических данных оценивают наиболее уязвимую составную часть конвейерной линии и производят резервирование этого конвейера путем введения транспортных мостов. Второй путь - это повышение составных частей конвейеров. Стационарность грузопотоков оказывает влияние на надежность работы конвейеров. Достижение необходимой стационарности поступающего грузопотока возможно за счет введения в технологическую схему бункера достаточной емкости. C использованием регулируемого привода бункер как накопитель исключается из технологической схемы. Но в этом случае возникают частые пуско-тормозные режимы, которые оказывают отрицательное влияние на надежность конвейерной установки. При оптимальном объеме бункера и системы регулируемого привода, получаем вариант оптимальной технологической цепочки. Оптимальный объем бункера рассчитывают из условий использования бункера как буфера, сглаживающего пики нагрузки, относительно средней величины, и акумулятора на период перехода конвейера с низшего уровня скорости на высший с минимально-возможным ускорением. При каждом из вариантов критериев управления целесообразно оценивать капитальные и эксплуатационные затраты и таким образом будет определяться себестоимость транспортирования груза.
1.5 Выводы и предложения по реализации исследований принципов управления
Задача выбора параметров системы конвейерного транспорта сводится к установлению рационального критерия управления конвейерной линией. Рациональным критерием (причем наиболее полным Критерием, т.к. он учитывает максимальное количество параметров, оказывающих влияние на конвейерную линию) следует считать критерий, обеспечивающий наименьшие приведенные затраты на транспортирование при надежной реализации плановой нагрузки.
При создании рационального критерия управления учитывают оптимальные критерии управления каждым из конвейеров при конкретной технологической ситуации, учитывающие такие параметры как уровень загрузки, уровень скорости, уровень натяжения, распределение тяговых усилий между приводными барабанами их взаимовлияния, центрирование ленты, работоспособности элементов.
Рассматривается оптимальный режим, обуславливаемый влиянием горнотехнических параметров горной массы, снижающий потери транспортируемого материала, а также технологические схемы, оказывающие влияние на работу конвейерной линии. Решение этой задачи целесообразно выполнять, используя средства микропроцессорной техники. Поскольку конвейерная линия по своей структуре является двухуровневой (1-й уровень - отдельный конвейер, 2-й уровень - ряд конвейеров, объединенных в линию), то целесообразно проектировать и двухуровневую систему автоматизированного управления конвейерной линией. Нижний уровень - это система автоматического управления, выполняющая задачи оптимизации работы отдельного конвейера в линии, учитывающие конструктивные особенности конвейера (ширину ленты, производительность, скорость, уровень натяжения, распределения тяговых усилий), а также на динамику в нестационарных режимах. Применение быстродействующей микропроцессорной техники позволит кроме решения этих задач решить задачу днагностирования технического состояния отдельных элементов конвейера. Большой объем оперативной памяти дает возможность производить учет времени простоев и производительной работы с целью оптимального планирования планово-предупредительных ремонтов и сокращения аварийных ремонтов.
Верхний уровень - это автоматизированная система управления конвейерной линией. В ее функции входит выполнение следующих задач. Определение рационального критерия управления при оценке всех параметров. Выдача управляющего сигнала для отработки этого критерия каждому из конвейеров линии. Режим слежения за выполнением выданного задания. Выполнение диспетчерской и информационной функции.
Известные технические решения (аппаратура типа "ЦИКЛ","Поток" и др.) осуществляют дистанционное управление, диспетчеризацию, защиту и блокировки. Функции регулирования эти системы не выполняют. Не решается вопрос рационального управления.
Для решения этого вопроса следует рассмотреть возмущающие воздействия, оказывающие влияние на работу конвейерной линии, оценить их влияние, выявить взаимосвязи этих воздействий, а также определить цели, стоящие перед проектировщиками конвейерных линий.
1.6 Постановка задач на исследование
В квалификационной работе магистра необходимо выявить самый рациональный критерий, обеспечивающий наименьшие приведенные затраты на транспортирование при надежной реализации плановой нагрузки. Все критерии преследуют цель уменьшения затрат на транспортирование, что влечёт за собой увеличение производительности и снижение расхода электроэнергии. Снижение расхода электроэнергии особо важно, так как мощности очень велики, и это позволит существенно снизить себестоимость транспортировки.
Необходимо также смоделировать динамические процессы в ленточном конвейере и на модели провести исследования этих процессов при использовании регулируемого и нерегулируемого приводов ленты конвейера. В результате этого исследования нужно получить зависимость уменьшения приведенных затрат при использовании регулируемого привода.
В процессе выполнения квалификационной работы магистра необходимо дать технико-экономическое обоснование выполненной работе, рассчитать годовой экономический эффект, который можно получить от внедрения средств модернизации конвейера серии КЛ5250.
Также нужно изучить условия труда на рабочем месте обслуживающего персонала конвейера, провести критический анализ опасных и вредных производственных факторов в горнорудном производстве, изучить вопросы охраны труда и техники безопасности.
При анализе возможных решений самым рациональный решением, обеспечивающим наименьшие приведенные затраты на транспортирование при надежной реализации плановой нагрузки, является использование регулируемого привода движения ленты.
Таким образом, основной задачей проектирования является исследование процесса транспортирования при использовании регулируемого привода движения ленты.
Исследования проводятся при помощи модели, которая реализует динамику конвейера.
конвейер груз динамический автоматизация
2. ИССЛЕДОВАНИЕ ВЛИЯНИЯ ПАРАМЕТРОВ КОНВЕЙЕРА НА ЕГО ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Правильный учет динамических процессов протекающих в конвейере является одним из основных факторов определяющих их работоспособность, надежность и экономичность. Если представить ленточный конвейер в виде структурной схемы, то динамические характеристики могут быть исследованы известными методами теории автоматического регулирования.
2.1 Непрерывное регулирование скорости ленты конвейера
Непрерывное регулирование скорости ленты конвейера предполагает использование замкнутой системы автоматического регулирования, которая должна состоять из датчиков величины грузопотока и скорости ленты в месте загрузки, элемента сравнения, усилителей, исполнительного устройства (привода), объекта регулирования и др.
В качестве датчика грузопотока используется телевизионный датчик объемной загрузки ленты, для определения скорости ленты применяется корелляционный метод с использованием вибродатчиков, объектом регулирования является конвейер, исполнительным органом – привод совместно с тиристорным преобразователем. Корректирующие устройства реализованы в микропроцессорной системе управления.
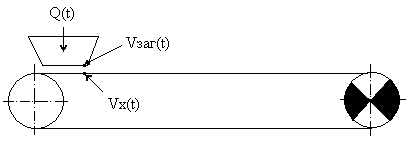
Рисунок 2.1 Укрупненная схема системы непрерывного регулирования
Задача состоит в том, чтобы по заданным характеристикам грузопотока Q(t), (рисунок 2.1) поступающего на конвейер, определить параметры замкнутой системы регулирования, при которых функция, получаемая на выходе этой системы [напряжение UVx, пропорциональное скорости ленты в месте загрузки Vx(t)], наилучшим образом аппроксимировала функцию, которую желательно получить [напряжение UVзаг, пропорциональное скорости ленты в месте загрузки Vзаг(t)], т.е. определить оптимальную динамическую систему регулирования по скорости (рисунок 2.2).
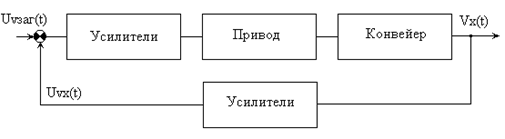
Рисунок 2.2 Структурная схема системы регулирования
Чтобы эта задача приобрела точную количественную формулировку, необходимо установить, что следует понимать под наилучшей аппроксимацией скорости, которую желательно получить на выходе динамической системы.
Вследствие случайного характера скорости, получаемой на выходе, условия наилучшего её приближения к желаемой величине должны иметь вероятностный характер. Например, можно считать наилучшим приближением такое, при котором в определённой области изменения аргумента вероятность того, что разность между аппроксимируемой Vзаг(t) и аппроксимирующей Vx(t) скоростями, большая по абсолютной величине некоторого заданного значения e, имела бы наименьшую величину. Наилучшим приближением можно считать и такое, при котором математическое ожидание абсолютной величины разности между ординатой заданной скорости и ординатой аппроксимирующей её скорости было бы минимальным. Наконец, можно потребовать, чтобы условию минимума удовлетворяло математическое ожидание квадрата этой разности.
2.1.1 Математическое описание непрерывного регулирования скорости
Перечисленным выше трем условиям наилучшего приближения функции Vx(t) и функции Vзаг(t) можно придать следующую математическую форму. Для обеспечения минимальной вероятности отклонения скорости ленты конвейера в месте загрузки от скорости, пропорциональной грузопотоку больше заданной величины e, необходимо, чтобы
P[| Vx(t) – Vзаг(t) | > e] = min. (1)
Требование минимума математического ожидания абсолютной величины разности между Vx(t) и Vзаг(t) означает выполнение условия
M[Vx(t) – Vзаг(t)] = min. (2)
Наконец, требование минимальной величины математического ожидания квадрата разности (требование минимума второго начального момента) приводит к условию
M{[Vx(t) – Vзаг(t)]2} = min. (3)
Если математические ожидания случайных функций Vзаг(t) и Vx(t) не равны нулю, то условие (3) целесообразно дополнить требованием
M[Vx(t) – Vзаг(t)] = 0,
которое означает отсутствие систематической погрешности системы. В этом случае условие (3) может быть переписано в виде
D[Vx(t) – Vзаг(t) ] = min
и соответствует простому физическому условию обращения в минимум дисперсии или среднего квадратического отклонения.
Несмотря на различную математическую формулировку оптимального приближения скорости Vx(t) к скорости Vзаг(t), физически эти критерии близки между собой, так как их выполнение означает, что скорость Vx(t), как правило, не сильно отклоняется от скорости Vзаг(t). Поэтому следует ожидать, что свойства динамической системы регулирования, построенной с учетом любого из этих требований, не будут сильно различаться. Это позволяет из большого числа возможных критериев выбрать наиболее простой критерий минимума среднего квадратического отклонения. Кроме того, когда скорости Vx(t) и Vзаг(t) являются нормальными (грузопоток является нормальным случайным процессом, а поскольку скорость Vзаг(t) – его линейное преобразование, то и она нормальна) и математическое ожидание разности Vx(t) – Vзаг(t) равно нулю, это требование гарантирует одновременное выполнение также условий (1) и (2).
Предположим, что на вход системы регулирования поступает полезный сигнал Vгр(t), пропорциональный грузопотоку, с наложенной на него помехой Vэкв(t), так что входной сигнал имеет вид
Vd[(t) = Vuh(t) + V’rd(t) (4)
где Vэкв(t) – эквивалентное приведенное ко входу электронного преобразователя (грузопоток – сигнал) значение помехи.
Воздействия Vгр(t) и Vэкв(t) являются стационарными случайными функциями с известными корреляционными функциями и равными нулю средними значениями. Если средние значения этих воздействий не равны нулю, то можно ввести центрированные величины V'i(t) = Vi(t) – M[V'(t)], средние значения которых равны нулю.
Система должна осуществлять линейное преобразование полезного сигнала Vгр(t) на входе в сигнал Vзаг(t) на выходе согласно формуле
L[Vзаг(t) ] = H(s) L[Vгр(t)], (5)
где H(s) – заданный преобразующий оператор; L – некоторый линейный оператор.
Введем обозначения
Vrp(t) = m'(t), Vэкв(t) = n(t), Vвх(t) = j(t), Vзаг(t) = h(t), Vx(t) = x(t)
и рассмотрим решение этой задачи.
Формулы (4) и (5) примут вид
j (t) = m'(t) + n(t), L[h(t)] = Н(s)L[m (t)].
Требуется, пользуясь этими данными, найти импульсную переходную функцию K(t), удовлетворяющую условию физической осуществимости K(t)=0, t=0 и обеспечивающую на интервале времени Т минимум среднего значения квадрата погрешности
 (6)
(6)
между требуемым h(t) и возможным в рассматриваемых условиях, изменением величины x(t) на выходе системы. Найдем выражение для среднего значения квадрата погрешности e2. Учитывая, что
![]() ,
,
получим на основании (6)
 (7)
(7)
Задача заключается в том, чтобы найти передаточную функцию Ф(jw) системы регулирования
 ,
,
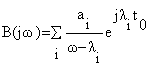
при которой величина e2 минимальна. Выражение для искомой передаточной функции
 , (8)
, (8)
где Ghj(w) – взаимная спектральная плотность процессов h и j ; y1(jw), y2(jw) – вспомогательные функции, которые являются преобразованиями Фурье от функций y1(t) = 0 при t <0 , y2(t) = 0 при t > 0.
Передаточную функцию y(jw), удовлетворяющую равенству (8), называют оптимальной передаточной функцией, так как она обеспечивает минимальную среднюю квадратическую погрешность совместно с условием физической осуществимости K(t) = 0 при t < 0, где
Задача нахождения функций y1(jw) и y2(jw) сводится к задаче разложения четной функции Gj(w), удовлетворяющей условию Gj(w)=0, на два множителя, из которых один представляет собой функцию, аналитическую и ограниченную в верхней полуплоскости, а другой функцию, аналитическую и ограниченную в нижней полуплоскости. Можно показать, что квадратическая амплитудная характеристика A2 (w) является подобно Gj(w) неотрицательной и четной функцией от w и может быть представлена в виде произведения двух множителей, один из которых содержит все нули и полюсы, расположенные в верхней полуплоскости, а другой – все нули и полюсы, расположенные в нижней полуплоскости, причем эти множители представляют собой комплексно сопряженные функции.
Следовательно, функции y1(jw) и y2(jw), удовлетворяющие тем же условиям, что и указанные два множителя, также представляют собой комплексно сопряженные функции
y1(jw) =y2*(jw) = y(jw)
y2(jw) = y1*(jw) = y*(jw)
y1(jw)y2(jw) = | y(jw) |2 = Gj(w) (9)
и способ определения функций y1(jw), y2(jw) из Gj(w) (по крайней мере, если эта последняя представляет собой дробно-рациональную функцию от w) аналогичен способу определения передаточной функции Ф(jw) по соответствующей ей квадратической амплитудной частотной характеристике.
Таким образом, в общем виде окончательное выражение для оптимальной передаточной функции имеет вид
 ,
,
где функция y(jw) определяется формулой (9).
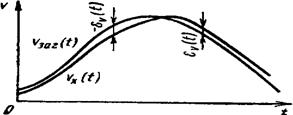
Рисунок 2.3 Характер изменения скорости в месте загрузки при непрерывном регулировании
Оценим среднюю квадратическую погрешность e, которая влияет на выбор ширины ленты. По рассчитанной оптимальной передаточной функции находим среднюю квадратическую погрешность. Скорость ленты конвейера в месте погрузки Vx(t) может в среднем отличаться от скорости, пропорциональной грузопотоку Vзагр(t) на величину ±ev (рисунок 2.3).
При отрицательной погрешности -ev скорость ленты меньше необходимой скорости, и в этом случае возможны просыпи груза, поэтому величина ev должна быть меньше величины рассчитанной погрешности eдоп.
При нормальной работе конвейера его производительность равна
Q = 3600Fгvнg, (10)
где Fг — площадь поперечного сечения груза на ленте; Vн — номинальная скорость конвейера; g — насыпная плотность груза.
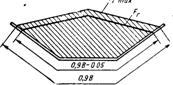
Площадь поперечного сечения Fг (рисунок 2.4,а) определяем при условии, что на ленте шириной В груз занимает ширину b=0,9B – 0,05 (рабочая ширина ленты) Максимальным резервом конвейера по производительности при условии, что отсутствуют просыпи, является величина
DQк = Qк max – Qк
а)
б)
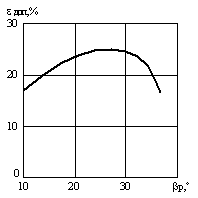
Рисунок 2.4 Определение максимально возможной площади поперечного сечения груза на ленте (а), и зависимость максимально допустимого значения eдоп от угла наклона боковых роликов (б)
Величину Qк max определяем из выражения
Qк max = 3600Fг maxvнg, (11)
где Fг max – максимально возможная площадь поперечного сечения, рас-считанная, например, при b = 0,9В.
При равных Qк в (10) и (11) резерв по площади позволяет иметь разные скорости, определяемые из выражения
v'н = FVн / Fmax (12)
Скорость v'н является минимально допустимой, при которой нет потерь груза.
Величину относительной погрешности по номинальной скорости, которую должна обеспечить система автоматического регулирования, определим как
![]() .
.
Подставляя выражение v'н изформулы (12), получим
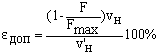 .
.
Таким образом, допустимая
погрешность регулирования по скорости зависит от геометрии грузонесущего
полотна конвейера. Если окажется, что рассчитанная оптимальная передаточная
функция не обеспечит выполнение условия ![]() , то необходимо брать ленту большей ширины.
, то необходимо брать ленту большей ширины.
Зависимость допустимой погрешности от угла bР наклона боковых роликов eдоп = f(bР) приведена на рисунке 2.4,б. Из графика следует, что у конвейера существует оптимальная геометрическая форма линейной секции, обеспечивающая максимальную допустимую погрешность.
Выражение (7) для среднего значения квадрата погрешности системы непрерывного регулирования скорости может быть представлено в виде

Сравнивая величину ![]() с рассчитанным значением погрешности eдоп, можно
сделать вывод о возможности работы конвейера с заданными характеристиками при
непрерывном регулировании его скорости с входным грузопотоком, обладающим
соответствующей динамикой.
с рассчитанным значением погрешности eдоп, можно
сделать вывод о возможности работы конвейера с заданными характеристиками при
непрерывном регулировании его скорости с входным грузопотоком, обладающим
соответствующей динамикой.
Одной из важных задач в подобной системе является задача экстраполяции, или, другими словами, задача статистического упреждения.
Конечно, в результате экстраполяции мы не можем получить точного будущего значения грузопотока, но ввиду его стационарности можно оценить наиболее вероятное его поведение в будущем. Необходимость экстраполяции объясняется невозможностью инерционной системы (конвейера) отрабатывать без задержки изменение сигнала, пропорционального входному грузопотоку.
Если задачу упреждения решают совместно с задачей сглаживания, это означает, во-первых, что требуемый закон преобразования входной величины имеет вид
мзаг(е) = мгр(е+е0)б
т. е. система регулирования должна воспроизводить на выходе в момент времени t с возможно меньшей погрешностью скорость, которая будет на входе системы в момент времени t+t0 и, во-вторых, на вход системы помимо управляющего (полезного) воздействия Uгр(t) поступает еще и возмущающее воздействие, или помеха, vэкв(t)
Помеха vэкв(t) обычно содержит более высокие частоты, чем полезный сигнал Uгр(t), и наилучшее воспроизведение входного сигнала может быть достигнуто лишь в результате сглаживания входного сигнала, т. е. подавления его высокочастотных составляющих.
Выражение для оптимальной передаточной функции для подобного случая имеет вид

2.1.2 Погрешность системы непрерывного регулирования
Рассчитаем погрешность регулирования для случая невысокого уровня помех. Следуя работам В.В. Солодовникова аналитическое выражение спектральной плотности грузопотока возьмем в виде
GQвх(w) = 2as2Q/(a2 + w2), (13)
которое при использовании соответствующих констант, дает
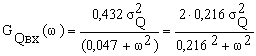 .
.
Линейное преобразование величины v(t), равное v(t)=Q(t)/3,6q=Q(t)/kQ приводит к преобразованию спектральных плотностей GV(w) от GQ(w) с коэффициентом k2Q.
Определяем значение коэффициента
k2Q = (3,6×80/60)2=4,82;
 .
.
Прежде всего, найдем полюсы функции (13)
Найдем вспомогательную функцию y(jw), которая удовлетворяет выражению
½y(jw)½2 = GVгр(w)
при условии, что все нули и полюсы расположены в верхней полуплоскости:
Находим функцию g(t) из выражения
![]() , т. е.
, т. е.
 .
.
Вычислим функцию
 ,
,
Тогда
Следовательно, оптимальная передаточная функция, определяемая выражением
![]() ,
,
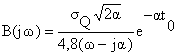
равна Ф(jw) = e-at0 и минимум среднего значения квадрата погрешности согласно выражению равен

На рисунке 2.5 построены зависимости emin от времени упреждения t0 и разных a.
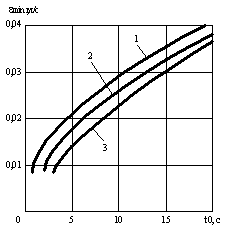
Рисунок 2.5 Зависимость допустимой погрешности от времени упреждения t0[a1(1)>a2(2)>a3(3)]
2.2 Структурная схема и параметры передаточных функций двухбарабанного ленточного конвейера типа ЛК-5250
Расчетная схема конвейера ЛК-5250 использованная при составлении структурной схемы приведена на рисуноке 2.6. При составлении уравнений приняты следующие условные обозначения: mпр1; mпр2; m3; m4; m’; m” приведенные к окружности приводных барабанов массы вращающихся частей приводных барабанов (с учетом соединительных муфт, редукторов и электродвигателей), хвостового, головного и отклоняющих барабанов; F1; F2 движущие усилия, развиваемые приводными электродвигателями на соответствующих приводных барабанах; x1; x2; x3; x4 - перемещения ленты на соответствующих барабанах; l1; l2; l3; l4 - длины соответствующих участков ленты между барабанами; w1; w2 - коэффициенты сопротивления движению грузовой и холостой ветвей конвейера; сг; с1; с2; с3 - коэффициенты жесткости участков ленты; h - коэффициент затухания колебаний в ленте; qг; qп - погонная масса соответственно грузовой и порожней ветвей конвейера; b угол наклона конвейера.
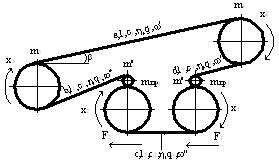
Рисунок 2.6 Расчетная схема ленточного конвейера КЛ5250
Дополнительно обозначим:
m1 = mпр + m'; m2 = mпр + m'',
a = qгlг/6; b = qпl1/6; c = qпl2/6; d = qгl3/6;
A1 = m1 + 2b + 2d; A2 = m2 + 2b + 2c;
A3 = m3 + 2c + 2a; A4 = m4 + 2d + 2a;
MS = A1+ A2+ A3+ A4+ 2a+ 2b+ 2c+ 2d = m1+ m2+ m3+ m4+ (qг+ qп)lг
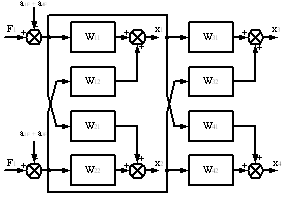
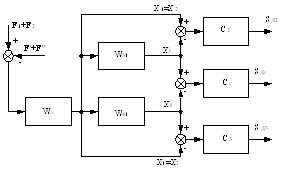
В результате решения дифференциальных уравнений движения элементов конвейера операторным методом по известной методике, с учетом принятых допущений, что статическая нагрузка не может измениться скачком, а натяжение в точке сбегания ленты со второго приводного барабана поддерживается постоянным, получим структурные схемы конвейера, приведенные на рисунке 2.7.
 |
а)
б)
Рисунок 2.7 Структурные схемы двухбарабанного конвейера
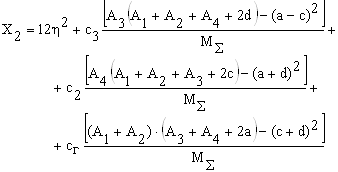
Передаточные функции в структурных схемах имеют следующий вид:
W11(p)=B(p) / [MS×p2×X(p)];
W22(p)=D(p) / [MS×p2×X(p)];
W12(p)=W21(p)=C(p) / [MS×p2×X(p)];
W31(p)=E(p) / [MS×p2×X(p)];
W32(p)=H(p) / [MS×p2×X(p)];
W41(p)=G(p) / [MS×p2×X(p)];
W42(p)=L(p) / [MS×p2×X(p)];
W'31(p)=[W22(p)×W31(p)-W32(p)×W12(p)] / [W11(p)×W22(p)-W12(p)×W21(p)]=
=[D(p)×E(p)-H(p)×C(p)] / [B(p)×D(p)-C2(p)];
W'32(p)=[W11(p)×W32(p)-W12(p)×W31(p)] / [W11(p)×W22(p)-W12(p)×W21(p)]=
=[B(p)×H(p)-C(p)×E(p)] / [B(p)×D(p)-C2(p)];
W'41(p)=[W22(p)×W41(p)-W21(p)×W42(p)] / [W11(p)×W22(p)-W12(p)×W21(p)]=
=[D(p)×G(p)-C(p)×L(p)] / [B(p)×D(p)-C2(p)];
W'42(p)=[W11(p)×W12(p)-W12(p)×W41(p)] / [W11(p)×W22(p)-W12(p)×W21(p)]=
=хИ(з)×Д(з)-С(з)×П(з)ъ . хИ(з)×В(з)-С2(з)ъб
где B(p); C(p); D(p); E(p); G(p); H(p); L(p) – операторные полиномы, порядок n которых и число степеней свободы j (число сосредоточенных масс барабанов) связаны элементарным соотношением n=2×j.
Сложность и громоздкость выражений для вычисления коэффициентов операторных полиномов в передаточных функциях, затрудняет возможность их использования при анализе и синтезе САУ. С другой стороны полученные передаточные функции отражают не только существенные, но и все второстепенные подробности динамики конвейера, которые можно опустить без ущерба для поставленной цели исследований. Основанием для такого утверждения служат известные результаты теории приближения функций, согласно которым переходный процесс высокого порядка можно с достаточной степенью точности вппроксимировать решением дифференциального уравнения второго, третьего порядка.
Среди различных методов приближения функций одним из наиболее распространенных является метод, основанный на приближении изображений и не накладывающий никаких дополнительных условий, вытекающих из требований близости оригиналов. В соответствии с этим методом динамическое звено с дробно-рациональной передаточной функцией
 ,
,
может быть аппроксимировано передаточной функцией следущего вида:
![]()
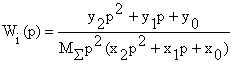 ,
,
что равносильно пренебрежению высокочастотными составляющими в аналитической зависимости выходной величины.
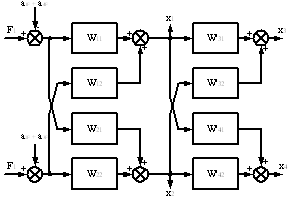
Дальнейшее упрощение структурных схем и параметров передаточных функций может быть получено при исследовании различных выходных величин конвейера в различных режимах работы за счет принятия соответствующих допущений:
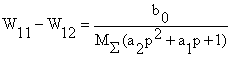
1. При определении динамического усилия на участке конвейера между приводными барабанами и рассмотрении процессов распределения нагрузки между приводными барабанами при анализе и синтезе САУ будем считать, что с2 = с3 = сг = 0, A3 = A4 = a = c = d = 0, структурная схема примет вид представленный на рисунке 2.8,а и коэффициенты в операторных полиномах X(p); B(p); C(p); D(p); будут равны:
X0=12h2c1; B0=12h2c1; C0=12h2c1; D0=12h2c1; X1=B1=C1=D1=32h3; X2=16h2A1A2/MS; B2=12h2A2; C2=0; D2=12h2A1.
Динамическое усилие в ленте между приводными барабанами и скорости движения ленты определяются следующим образом
SД1=(x1-x2)c1=[(F1-F')(W11-W12)-(F2-F'')(W22-W12)]c1;
 ;
;
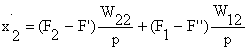 .
.
2. При определении дпнамических усилий в грузовой ветви конвейера и на участках холостой ветви конвейера, а также при анализе и синтезе САУ, обеспечивающих ограничение динамических нагрузок вленте считаем, что
с1=¥; сг=с2с3/(с2+с3).
Структурная схема конвейера в этом случае еммеет вид представленный на рисунке 2.8,б , а коэффициенты операторных полиномов
Ч(з)ж И(з)=С(з)=В(з)ж У(з)=Р(з)ж П(з)=Д(з)
равны
X0=B0=E0=G0=2с2с3; X1=B1=E1=G1=4h(c2+c3+cг);
B2=12h2+A4(cг+c2)+A3(cг+c3)+2acг;
E2=12h2+A4c2-cг(c+d)-c3(a+c);
G2=12h2+A3c3-c2(a+d)-cг(c+d).
Наибольший интерес представляет исследование динамического усилия в грузовой ветви ленты, которое может быть определено следующим образом
ЫДг=(ч3-ч4)сг=(А1+А2-Аэ-Аээ)ЦэхЦээ31-Цээ41ъю
а)
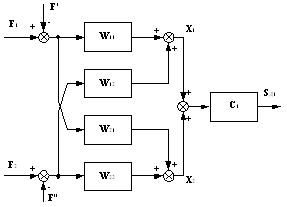
б)
Рисунок 2.8 Преобразованные структурные схемы конвейера КЛ5250
2.3 Методика исследования динамических характеристик конвейера на основании математической модели
Для оценки эффективности устройства автоматического управления и контроля ленточных конвейеров необходимо иметь представление о характере изменения скорости движения ленты в различных точках конвейера и динамических усилий в различных ветвях ленты конвейера.
Сравнение динамических характеристик конвейера при различных конструктивных параметрах и различной структуре электропривода и САУ, удобно производить зная его реакцию на определенные нормированные воздействия.
В качестве нормированного управляющего воздействия будем рассматривать ступенчатое увеличение движущего усилия, развиваемого приводными электродвигателями на соответствующих барабанах конвейера
F1(t) = (F1-F'1)×1(t) = F*1×1(t);
F2(t) = (F2-F'2)×1(t) = F*2×1(t).
Изображение по Лапласу управляющего воздействия в виде ступенчатой функции Fi(p)=F*i/p, а изображение i-й выходной величины
Hi(p)=F*i×Wi(p)/p,
где Wi(p)-передаточная функция ленточного конвейера, связывающая входное управляющее воздействие с i-й выходной величиной, поведение которой исследуется.
Исследование динамических характеристик производим методом анализа аналитических зависимостей исследуемых величин, которые получаются из их изображений при помощи таблиц обратного преобразования Лапласа.
Динамическое усилие между приводными барабанами в соответствии со структурной схемой (рисунок 2.8,а)
SДi=(x1-x2)c1; x1=F*1W11+F*2W12; x2=F*2W22+F*1W12;
SД1(p)=[F*1(W11-W12)-F*2(W22-W12)]c1;
 ;
;
 ,
,
где b0=A2/c1; d0=A1/c1; a1=8h/3c a2=4A1A2/3MSc1.
После преобразований с добавлением управляющего воздействия получим следующее выражение
 .
.
Динамическое усилие в грузовой ветви конвейера в соответствии со структурноу схемой (рисунок 2.8,б)
ЫДг = (ч3-ч4)сгж ч3 = (А*1+А*2)ЦЭЦээ31ж ч4 = (А*1+А*2)ЦЭЦээ41ж
SДг(p) = (F*1+F*2)(W32-W41)cг;
 ;
;
После преобразований с добавлением управляющего воздействия получим следующее выражение
 .
.
Аналитические выражения для определения динамических усилий SД1(t) и SДг(t) выглядят следующим образом
![]() ;
;
 ,
,
где l; l'; g; g' – частоты и коэффициенты затухания колебаний соответственно на участке между приводными барабанами и в грузовой ветви конвейера.
Если пренебречь затуханием колебаний в элементах конвейера, т. е. принять h = 0; a1 = b1 = c1 = d1 = 0
![]() ;
;
 .
.
Максимальные значения динамических усилий будут наблюдаться в моменты времени, когда cos l t = -1
![]()
при tmax = p T = p Öa2;

при tmax = p T= p Öa'2.
Анализ приведенных выше выражений показывает, что при ступенчатом приложении движущих усилий к приводным барабанам ленточного конвейера КЛ5250 динамические усилия SД1(t) и SДг(t) изменяются по синусоидальносу закону относительно средних значений необходимых для равноускоренного движения элементов конвейера. Частота колебаний динамических усилий между приводными барабанами и в грузовой ветви конвейера соответственно
![]() и
и ![]() .
.
2.4 Зависимость статического усилия и момента инерции конвейера от уровня загрузки
Суммарное статическое усилие на приводных барабанах определяется как разность между усилием в точке набегания на первый (по ходу движения ленты) приводной барабан SНБ1 и усилием в точке сбегания ленты со второго приводного барабана
SНБ2 FСS = SНБ1 – SНБ2.
Суммарный момент инерции конвейера равен
JKS = MS R2Б.
Преобразуем выражения к следующему виду
FCS = k DQ + FCXX;
JKS = R2Б DQ + JXX,
где k = (sin b + w' cos b); DQ = qMqГ
количество материала, находящегося на ленте конвейера;
FCXX=(lГ+l1+l2+l3)[qП(w'+w'')cosb+(q'P-q''P)sinb+(q'Pw'-q''Pw'')cosb];
JXX=R2Б[mПР1+mПР2+m3+m4+(l1+l2+l3)qП+(qЛ+q'P)lГ].
При работе конвейера все величины входящие в выражения остаются постоянными за исключением погонной нагрузки qM от транспортируемого материала. На рисунке 2.9 приведены зависимости суммарного статического усилия FCS и момента инерции конвейера от количества груза на ленте DQ.
Диапазон и интенсивность изменения FCS и JKS зависит от конструктивных параметров конвейера. Так, например, интенсивность изменения FCS зависит от коэффициента k и, следовательно от угла наклона b конвейера и коэффициента сопротивления w'. Чем больше угол наклона конвейера, тем больше разница между статическими нагрузками холостого и номинально нагруженного конвейера.
Оценим зависимости FCS и JKS от времени в момент пуска конвейера. В различных точках конвейера лента при пуске приходит в движение неодновременно. В первоначальный момент времени при пуске приходит в движение лента на приводных барабанах, и по мере распространения упругой волны по контуру конвейера приходит в движение остальная часть ленты. Вся лента придет в движение через время tS, которое называется временем трогания.
Для конвейера КЛ5250
tS = t2 + t3 + tГ,
где t2; t3; tГ – времена распространения упругой волны соответственно в холостых ветвях ленты длиной l2, l3 и грузовой ветви ленты длиной lГ.
Скорость распространения упругой волны и грузовой ветви
![]() ;
;
в холостой ветви
 .
.
Следовательно
![]() .
.
Время трогания конвейера зависит от его уровня загрузки и при её изменении от нуля до номинальной величины tS изменяется от tSmin до tSmax. Следовательно, величины FCS и JKS изменяются во времени.
На рисунке 2.9, в, г приведены зависимости FCS и JKS от времени при различных уровнях загрузки конвейера.
Полученные зависимости показывают, что в пусковых режимах за счет того в первоначальный момент времени статическая нагрузка и момент инерции конвейера ниже номинальных значений, то динамические нагрузки на ленту могут значительно превышать расчетные.
Поэтому выбор типа электропривода и параметров настройки САУ электроприводом необходимо производить с учетом конструктивных параметров конвейера и полученных зависимостей
АСS = а(DЙ)ж ОЛS = а(DЙ)ж АСS = а(е)ж ОЛS = а(е)ю
Таким образом, по известным конструктивным параметрам конвейера и по выведенным зависимостям могут быть оценены величины и характер динамического усилия в ленте на участке между приводными барабанами и на участке грузовой ветви конвейера, частоты колебаний, диапазон изменения статической нагрузки (момента) FCS и момента инерции конвейера JKS, время трогания конвейера tS, а также рассчитаны параметры оптимальной диаграммы пуска, при которой при максимальном быстродействии обеспечивается минимальные динамические нагрузки на ленту конвейера. Кроме этого на основании этих зависимостей определяют параметры САУ распределением нагрузок.
3. ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ
3.1 Определение капитальных вложений в средства автоматизации
В экономических расчетах определение капитальных вложений в средства автоматизации включает: расчет капитальных вложений по базовому варианту (аналога конструкции) и по проектируемому варианту. Методика расчета в обоих вариантах аналогична.
В базовом варианте капитальные затраты составляют стоимость базовой системы управления конвейером КЛ5250:
КББАЛ = ЦБСУ = 7300 грн.
В проектируемом варианте капитальные затраты включают в себя стоимость новой системы управления этим конвейером.
КПБАЛ = ЦПСУ = ЦПТУО + ЦПСОС + ЦПМПСУ,
где ЦПТУО = 8400 грн – стоимость промышленной телевизионной установки для определения объемной производительности конвейера;
ЦПСОС = 7650 грн – стоимость системы определения скорости на основе вибродатчиков, устанавливаемых на ставе конвейера;
ЦПМПСУ = 27150 грн – стоимость микропроцессорной системы управления конвейером со вспомагательным оборудованием.
КПБАЛ = ЦПСУ = 8400 + 7650 + 27150 = 43200 грн.
3.2 Расчёт себестоимости транспортировки (изменяющейся части) по базовому и проектируемому варианту
Изменяющаяся часть технологической себестоимости может быть представлена в следующем виде:
С = Сэ + Зо + Зб + А + Зэк,
где Сэ – стоимость расходуемой технологической энергии, грн.;
Зо – зарплата персонала, обслуживающего эксплуатируемую систему управления. грн.;
3б - суммарные отчисления в бюджет по зарплате, грн.;
А - амортизационные отчисления на реновацию системы управления, грн.;
Зэк - расходы на содержание и эксплуатацию оборудования. грн.
3.2.1 Стоимость расходуемой технологической энергии
Общая стоимость расходуемой энергии на транспортировку одной тонны породы определяется по формуле:
Сэ = Рс ТТ Sм,
где РБс = 3000 кВт – средняя потребляемая мощность оборудования и приборов по базовому варианту;
РПс = 2640 кВт – средняя потребляемая мощность оборудования и приборов по плановому варианту;
ТТ = 1 / QТ = 1 / 5250 час/т. – время транспортировки тонны породы, где QТ = 52250 т/час. – часовая производительность конвейера;
Sм =0,2 грн. – стоимость одного киловатт-часа электроэнергии.
СБэ = 3000 0,2 / 5250 = 0.11 грн/т.
СПэ = 2600 0,2 / 5250 = 0.1 грн/т.
Определим Фд – действительный фонд времени работы оборудования.
Фд = 2070 S (1 – ß / 100),
где S = 3 – число смен работы оборудования;
ßБ = 9 % – процент простоев оборудования в ремонте по базовому варианту;
ßП = 5 % – процент простоев оборудования в ремонте по плановому варианту.
ФБд = 2070 3(1 – 9 / 100) » 5650 час.
ФПд = 2070 3(1 – 5 / 100) » 5900 час.
Определим количество транспортируемых тонн руды по базовому NБТР и проектируемому NПТР вариантам:
NБТР = ФБд QТ = 5650 5250 = 29662,5 тыс. т.
NПТР = ФПд QТ = 5900 5250 = 30975 тыс. т.
Таким образом, за год затраты на технологическую энергию составят:
СБэ(год) = СБэ NБТР = 0,11 29662500 » 3263 тыс. грн.
СПэ(год) = СПэ NПТР = 0,1 30975000 » 3098 тыс. грн.
3.2.2 Зарплата обслуживающего персонала по эксплуатации приборов и систем автоматизации
Модернизация системы автоматизации влечет за собой повышение квалификации обслуживающего персонала (операторов) с 4-го разряда на 5-й. Так как работники состоят на должностных окладах, то расчет ведется по формуле:
Зо = До n Кп Кд Sм Кс,
где До – должностной оклад оператора (для 4-го разряда – 210 грн., для 5-го – 240 грн.);
n - количество операторов, обслуживающих систему или прибор (3 человека – по одному в каждой смене);
Кп, Кд - коэффициенты, учитывающие премиальные и дополнительную зарплату (Кп = 1,2; Кд = 1,15);
Sм - число месяцев работы (принимается 12);
Кс = 1 – коэффициент сменности работы оборудования;
ЗБо = 210 3 1,2 1,15 12 1 = 10432,8 грн.
ЗПо = 240 3 1,2 1,15 12 1 = 11923,2 грн.
3.2.3 Суммарные отчисления в бюджет по зарплате
Величина отчислений берётся от суммы начисления зарплаты и составляет 37,5 %:
ЗБб = ЗБо 0,375 = 10432,8 0,375 = 3912,3 грн.
ЗПб = ЗПо∙0,375 = 11923,2 0,375 = 4471,2 грн.
3.2.4 Амортизационные отчисления на реновацию систем управления
Учитывая, что проекты модернизации систем управления не затрагивают модернизацию основного технологического оборудования или технологических комплексов, то изменяющаяся часть общих амортизационных отчислений, учитываемых в расчетах себестоимости продукции, касается только систем управления.
Определяются амортизационные отчисления следующим образом:
А = ЦСУ∙НСУ,
где ЦБСУ = 7300 грн. – стоимость базовой системы управления;
ЦПСУ = 43200 грн. – стоимость системы управления по планируемому варианту;
НСУ = 25% – норма амортизационных отчислений на реновацию системы управления.
АБ = 7300∙0,25 = 1825 грн.
АП = 43200∙0,25 = 10800 грн.
3.2.5 Расходы на содержание и эксплуатацию управляющих приборов и систем
Эксплуатационные расходы на содержание и эксплуатацию управляющих систем представляют собой заработную плату обслуживающего персонала, расходы по текущему ремонту и текущему обслуживанию систем.
Заработная плата обслуживающего персонала включает затраты на содержание наладчика (двое по плановому варианту) и ремонтника, которые требуются при эксплуатации системы (прибора), для поиска, ремонта и устранения отказов.
Ср(н) = Тр Ч Кп Кд Кот,
где Тр - время, затрачиваемое на ремонт систем в год, час.
ТБр = 2070 S (β / 100) = 2070 3 (9 / 100) = 558,9 час.,
ТПр = 2070 S (β / 100) = 2070 3 (5 / 100) = 310,5 час.;
Ч - часовая тарифная ставка ремонтника (наладчика) (Чр(н) = 2,2 грн.);
Кп, Кд - коэффициенты, учитывающие премии и доплаты соответственно (Кп = 1,2; Кд = 1,15);
Кот - коэффициент отчислений на соцстрах, фонд Чернобыля и занятости, равный 1,375.
СБр(н) = 558,9 2,2 1,2 1,15 1,375 = 2333.1 грн.
СПр(н) = 310,5 2,2 1,2 1,15 1,375 = 1296,2 грн.
В расходы по текущему ремонту и обслуживанию систем входят стоимость материалов при ремонте, которые можно определить как процент от балансовой стоимости управляющей системы.
ЗТОиР = ( Фбал Нто) / 100,
где Нто - процент отчислений на техобслуживание и ремонт, составляющий 9% по базовому варианту и 5% по плановому;
ФББАЛ = 7300 грн. – балансовая стоимость управляющей системы по базовому варианту;
ФПБАЛ = 43200 грн. – балансовая стоимость управляющей системы по плановому варианту.
ЗБТОиР = (7300 9) / 100 = 657 грн.
ЗПТОиР = (43200 5) / 100 = 2160 грн.
Итоговая сумма затрат на содержание и эксплуатацию управляющих систем рассчитывается по формуле:
ЗБэк = 2∙Ср + Сн + ЗБТОиР = 2333,1 + 2333,1 + 657 = 5323,2 грн.
ЗПэк = 2∙Ср + Сн + ЗПТОиР = 1296,2 + 2∙1296,2 + 2160 = 6048,6 грн
Все расчеты годовых затрат на транспортировку до и после модернизации сводятся в таблицу 3.1.
Таблица 3.1
затраты на транспортировку до и после модернизации
| № | Наименование затрат |
Базовый вариант, грн. |
Проектируемый вариант, грн. |
Отклонения (+) – увеличен. (-) – уменьшен. грн. |
Процент от проектир. Варианта. | |
| 1 | Технологическая энергия | 3263000 | 3098000 | -165000 | -5,33% | |
| 2 | Зарплата обслуживающего персонала | 10432,8 | 11923,2 | 1490,4 | 12,50% | |
| 3 | Отчисления в бюджет по зарплате | 3912,3 | 4471,2 | 558,9 | 12,50% | |
| 4 | Амортизационные отчисления | 1825 | 10800 | 8975 | 83,10% | |
| 5 | Расходы на содержание и эксплуатацию | 5323,2 | 6048,6 | 725,4 | 11,99% | |
| 6 | Итого | 3284493,3 | 3131243 | -153250,3 | -4,89% | |
3.3 Расчёт годового экономического эффекта
Величина годового экономического эффекта рассчитывается по формуле:
Эгод = [(СБ + Ен КБ) - (СП + Ен КП)] NПТР,
где СБ и СП – себестоимость транспортировки (годовая) по базовому и проектируемому варианту, грн. (приведённая);
КБ и КП – величина капитальных вложений в средства автоматизации по базовому и проектируемому вариантам, грн. (приведённые);
Ен = 0,15 – нормативный коэффициент эффективности капитальных вложений;
NТР - годовой объем транспортируемого материала после модернизации оборудования, т.
Определим удельные капитальные вложения
Удельные капитальные вложения по базовому и проектируемому вариантам рассчитываются из формул:
КБ = Кбаз / NБТР,
КП = Кпр / NПТР,
где Кбаз, Кпр - капитальные затраты по базовому и проектируемому вариантам, грн.
NБТР, NПТР - годовой объем транспортируемого материала по базовому и проектируемому вариантам, т.
Удельные капитальные вложения составляют:
КБ = 7300 / 29662500 = 0,0025 грн/т.
КП = 43200 / 30975000 = 0,0139 грн/т.
Определим удельную себестоимость продукции.
Удельная себестоимость по базовому и проектируемому вариантам рассчитывается по формуле:
СБ = Сбаз. / NБТР.
СП = Спр. / NПТР.
где Сбаз, Спр. – себестоимость продукции по изменяющимся статьям затрат (итог таблицы 4.1), грн.
СБ = 3284493,3 / 29662500 = 0,11 грн/т.
СП = 3131243 / 30975000 = 0,1 грн/т.
Рассчитаем величину годового экономического эффекта:
Эгод=[(0,11+0,15∙0,0025)-(0,1+0,15∙0,0139)]∙30975000=15252,7грн.
Расчет окупаемости капитальных затрат.
Окупаемость рассчитывается в годах по формуле:
Ток.расч = ( КП – КБ) / (СБ – СП).
Ток.расч = (0,0139 – 0,0025) / (0,11 – 0,1) = 1,2 года.
3.4 Технико-экономические показатели проекта и выводы по принятым техническим решениям
Для расчета технико-экономических показателей проекта определим:
1. Снижение себестоимости продукции как разность затрат между базовым и проектируемым вариантами:
∆С = СБ – СП = 0,11 – 0,1 = 0,01 грн/т.,
в процентах:
∆С=100 – ((СП/СБ)∙100)=100 – ((0,1/0,11)∙100)=9,1%,
где СБ, СП – себестоимость приведенная.
2. Изменение капитальных затрат как разность затрат в базовом и проектируемом вариантах:
∆К = КП – КБ = 43200 – 7300 = 35900 грн,
в процентах:
∆К=100–((КБ/КП)∙100)=100–((7300/43200)∙100)=83,1%
3. Сокращение затрат на технологическую энергию как разность затрат в базовом и проектируемом вариантах:
∆Сэ = СБэ – СПэ = 3263 – 3098 = 165 тыс. грн./год.
в процентах:
∆Сэ=100–((СПэ/СБэ)∙100)=100–((3098/3263)∙100)=5,06%.
4. Увеличение объема транспортировки как разность объёмов транспортировки по проектируемому и базовому вариантам:
∆NТР = NПТР - NБТР = 30975 – 29662,5 = 1312,5 тыс т/год.,
в процентах:
∆NТ=100–((NБТ/NПТ)∙100)=100–((29662,5/30975)∙100)=4,2%
Таким образом, использование средств модернизации снижает потребление электроэнергии, увеличивает годовую производительность за счет уменьшения времени простоя на ремонт уменьшает себестоимость транспортировки.
Подтверждаются экономические выводы по проекту модернизации технико-экономическими показателями, представленными в таблице 4.2.
Таблица 4.2
Экономические выводы по проекту модернизации
| № | Наименование показателей | Единица измерения | Базовый вариант | Проектируемый вариант | Изменения | |
| Базовая единица измерения | % | |||||
| 1 | Часовая производительность | т/час | 5250 | 5250 | 0 | 0 |
| 2 | Годовая производи-тельность | т/год | 29662500 | 30975000 | 1312500 | 4,2 |
| 3 | Затраты на электроэнер-гию | грн/год | 3263000 | 3098000 | -165000 | -5,06 |
| 4 | Себесто-имость | грн/т | 0,11 | 0,1 | -0,01 | -9,1 |
| 5 | Капитальные вложения | грн. | 7300 | 43200 | +35900 | +83,1 |
| 6 | Годовой экономичес-кий эффект | грн. | 15252,7 | |||
| 7 | Срок окупаемости капитальных затрат | год. | 1,2 | |||
4. ОХРАНА ТРУДА
4.1 Анализ вредных и опасных производственных факторов при эксплуатации конвейера КЛ5250
Конвейер КЛ5250 предназначен для открытой транспортировки различных видов пород в условиях Днепропетровского бассейна и других аналогичных бассейнов.
Температура окружающего воздуха:
- для электрооборудования, размещенного в отапливаемых помещениях (шкафы, пульты управления, НКУ, и т.п.) от +5о до +35о С, при относительной влажности 30 ÷ 80 %;
- для электрооборудования размещенного в неотапливаемых помещениях и открыто на механизмах (электродвигатели, силовые трансформаторы, датчики, аппараты управления и т.п.) от -25о до +35о С, при относительной влажности 30 ÷ 90 %.
Запыленность рудничной пылью (не токопроводящей):
- для электрооборудования устанавливаемого в помещениях ‑ до 10 мг/м3;
- для электрооборудования устанавливаемого открыто ‑ до 115 мг/м3.
Высота над уровнем моря не более 1000 м.
Длительный крен и дифферент для оборудования: вверх – 20о, вниз – 20о.
При работе электрооборудование подвергается воздействию:
- вибрации в вертикальной плоскости с ускорением Iд, частотой 2 ÷ 19 Гц;
- одиночных ударов с ускорением uд, длительностью 30 ÷ 40 мс;
Режим работы конвейера – круглосуточный, круглогодичный.
На конвейере приняты напряжения:
- питающее 3 ~ 50 Гц, 6000 В;
- высоковольтных потребителей 3 ~ 50 Гц, 6000 В;
- низковольтного потребления 3 ~ 50 Гц, 220 В, 380 В;
- цепей управления и сигнализации 50 Гц, 220 В, 380 В, ‑24 В, ‑220 В;
- цепей рабочего освещения 50 Гц, 220 В;
- цепей ремонтного освещения 50 Гц, 12 В;
- цепей аварийного освещения –220 В
Колебания напряжения питающей сети ±15%
4.2 Требования к организации рабочего места
При выборе и размещения в моторном поле рабочего места органов управления учитывают физиологические особенности двигательного аппарата человека по ГОСТ 12.2.049—80.
Органы управления машинами и механизмами — по ГОСТ 12.2.064—81 и настоящему стандарту.
Форма, размер, усилия и расстояние между кнопками — по ГОСТ 22614-77.
Размеры усилия и вид рычага и рычажного выключателя типа тумблер — по ГОСТ 21753—76 и ГОСТ 22615—77.
Размеры, усилия и форма поворотных выключателей и переключателей — по ГОСТ 22613—77, клавишных и кнопочных выключателей и переключателей — по ГОСТ 22614—77.
Места контактов органов управления с ручками оператора имеют коэффициент теплопроводности не более 0.5 Вт/(м°С).
Органы управления кодированы двумя или несколькими отличительными способами: формой, размером, видом операции управления, надписями, цветом.
Символы органов управления — по ГОСТ 12.4.040—78.
4.3 Требования по нормализации микроклимата
В связи с тем, что при работе конвейера в забое имеет место интенсивное образование пыли, электродвигатели всех механизмов имеют закрытое исполнение. Для очистки воздуха подаваемого на охлаждение электродвигателей привода ленты предусмотрена установка пылеотделителей. Помимо этого все помещения с электрооборудованием имеют избыточное давление, либо вынесены за пределы интенсивного пылеобразования на консоль, либо отделены от мест перегрузки пыленепроницаемыми перекрытиями и кожухами (электрооборудование опорной части, контактные устройства, токоподводы). Обслуживающие помещения, в которых в процессе работы постоянно находится обслуживающий персонал, снабжены калориферами и оборудованы специальными фильтровентиляционными системами.
Допустимые нормы температуры, скорости движения воздуха и относительной влажности воздуха на рабочих местах обслуживающего персонала в рабочих помещениях машин для открытых горных работ — указанны в таблице 4.1.
Таблица 4.1
Нормы температуры, скорости движения воздуха и относительной влажности воздуха на рабочих местах
| Сезон года | Рабочее место | Температура воздуха. °С | Относительная влажность воздуха, % | Скорость движения воздуха, м/с |
| Теплый период |
Постоянное Временное пребывание |
Не выше плюс 31 Не выше плюс 33 |
55-75 55-75 |
0,2—0.7 Не более 1,0 |
| Холодный и переходный периоды |
Постоянное Временное пребывание |
От плюс 15 до плюс 23 Не ниже плюс 10 |
Не более 75 Не более 75 |
0,2—0,4 0,2—0.4 |
Примечание: Вертикальный н горизонтальный перепад температур не превышает 4°С.
В конструкции машин для открытых горных работ предусмотрены: покрытия, отражающие солнечную радиацию; средства защиты от метеорологических осадков и солнечной радиации, расположенные на рабочих площадках; средства нормализации температуры воздуха помещений закрытого типа (кондиционеры, системы обогрева и т. д.).
4.4 Требования по борьбе с шумом и вибрацией
Шум на рабочих местах операторов — по ГОСТ 12.1.003—83.
Вибрация на органах управления и рабочих местах операторов — по ГОСТ 12.1.012—78.
Средства защиты от шума и вибрации по отношению к источнику возбуждения — по, ГОСТ 12.1.029—80 и ГОСТ 12.4.046—78.
Инфразвук на рабочих местах операторов — по «Гигиеническим нормам инфразвука на рабочих местах», утвержденным Минздравом Украины.
4.5 Требования к освещению
Для обеспечения нормальных условий эксплуатации механизмов и приборов внутри помещений и машинных отделений, освещенность обеспечивается не менее 50 лк. Во избежание ослепления применяют светильники рассеянного типа.
Освещенность приборов и указателей в отдельности или на приборной панели не должна давать бликов на стеклах этих приборов, действовать раздражающе на глаза оператора и исключать необходимость менять оператора позу при обзоре прибора.
Исходя из этих требований, освещение приборов и указателей принимается в пределах 0,3 ÷ 1,1 лк, обеспечиваемое заливающим светом, индивидуальным освещением. При заливающем свете белого или красного цвета, светильники устанавливают сверху панели. Индивидуальное освещение применяют для каждого прибора путем размещения малогабаритного светильника за панелью прибора.
В темное время суток зона работы конвейера достаточно освещена. Запрещается пользоваться переносными светильниками на напряжение выше предусмотренного на конвейере для цепей местного освещения – 12В.
Цветовое оформление машины и сооружений считается рациональным, если время адаптации глаз минимально, утомление зрения минимально и исключается отблеск окраски при отраженном солнечном освещении. Машины и механизмы для открытых горных работ с электроприводом и дизельным ДВС оснащены автономными осветительными приборами с коэффициентом запаса освещенности 1,5.
Освещенность, в люксах, рабочих мест, поверхностей и помещений от осветительных установок машин, а в горизонтальной плоскости при использовании ламп накаливания соответствует следующим значениям приведенным в таблице 4.2
Таблица 4.2
Освещенность рабочих мест
| Объект | лк |
| Пульт управления | 30 |
| Пульт управления со средствами отображения информации | 150 |
| Стол для записей | 150 |
| Зона объекта различения (поверхность забоя, горной массы и т. д.) | 75 |
| Зова ремонтных и профилактических работ | 100 |
Освещенность отсчетных устройств визуальных индикаторов — по ГОСТ 22902—78.
Размещение осветительных установок исключает попадание прямого света в глаза обслуживающего персонала и обеспечивает соотношение максимальной и минимальной освещенности при комбинированном и общем освещении соответственно не более 1,8 и 3.
Светильники имеют арматуру прямого света.
4.6 Меры безопасности при организации работы конвейера и предупреждение аварийных ситуаций
Для конвейера, всех его механизмов, а также для оборудования имеются паспорта и инструкции по технике безопасности. К управлению оборудованием допускается рабочие, имеющие удостоверения на право управления этим оборудованием.
Перед пуском в эксплуатацию конвейера, на который распространяются правила Гостехнадзора, его подвергают техническому освидетельствованию. Это освидетельствование включает осмотр, а также статические и динамические испытания.
Статические испытания имеют целью проверить прочность конвейера и его устойчивость.
Динамические испытания конвейера имеют целью проверку действия механизмов с максимальными нагрузками.
Осмотру и проверке в работе подлежат все механизмы, электрооборудование, приборы безопасности, тормоза, аппараты управления, освещение, сигнализация, заземления, а также состояние металлоконструкций.
Пространство, в котором производится работа движущихся частей конвейера, считается недопустимым для нахождения посторонних лиц, других машин, сооружений, высоковольтных линий электроснабжения и т.д. – называется зоной работы конвейера.
Опасной зоной – считается пространство в габаритах зоны работы машины при отсутствии ограждения или других предупреждающих средств. Так, к опасным зонам относятся участки движения ленты, загрузочная и разгрузочная станции, подборщики просыпей и т.п. Эти участки ограждают щитами, сборно-разборными инвентарными ограждениями или же устанавливают предупреждающие надписи, а в темное время суток зажигают красный свет.
4.7 Требования к электробезопасности
Подача напряжения на конвейер возможна только после проверки состояния изоляция, исправности распределительных устройств, исправности заземления всего электрооборудования и заземления металлоконструкции конвейера.
При подаче напряжения на конвейер весь эксплуатационный персонал и лица производящие работы (наладчики, монтажники, ремонтники), должны быть оповещены ответственным лицом по приему напряжения и приняты меры предосторожности исключающие несчастные случаи.
Запрещается подача высокого напряжения при снятых кожухах и высоковольтных токоподводов. Спецключи от замков высоковольтных распредустройств, кожухов высоковольтных токоподводов должны находиться у лиц ответственных за данный участок работы. Запрещается эксплуатация при открытых дверях высоковольтных распредустройств, станций и пультов управления и при снятых защитных кожухах о электрооборудования. Запрещается в высоковольтных распредустройствах открывать двери шкафа верхнего отсека при наличии напряжения на сборных шинах и питающих кабелях. Во всех случаях осмотра каждого шкафа после открывания дверей верхнего отсека должна производиться проверка напряжения на всех частях, которые могут быть под напряжением.
При выполнении работ по ремонту и наладке электрооборудования на конвейере, строго выполнять требования правил безопасности по снятию напряжения ограждению мест работы и вывешиванию предупредительных плакатов с надписями «Не включать ‑ работают люди», «Стой ‑ высокое напряжение», «Стой ‑ опасно для жизни», «Работать здесь», и др.
На конвейере всегда должны иметься в наличии исправные и прошедшие испытания в установленные сроки изолирующие защитные средства, диэлектрические боты, перчатки, резиновые коврики, указатели напряжения штанги, переносные защитные заземления и др.
Переносные заземления изготовляются на месте и должны удовлетворять следующим условиям:
- провода для закорачивания и заземления должны быть выполнены из гибких медных жил сечением не менее 25мм2;
- зажимы для присоединения закорачивающих проводов должны быть такой конструкции, чтобы при прохождении тока короткого замыкания переносное заземление не было сорвано с места динамическими усилиями;
- все присоединения элементов переносного заземления должны быть выполнены прочно и надежно путем опрессования, сваривания, скручивания с последующей пайкой (применение одной только пайки запрещается).
При наложении заземления сначала присоединяют заземляющих провод к земле, затем проверяют отсутствие напряжения на заземляемых токоведущих частях, после чего зажимы закорачивающих проводов с помощью штанги накладывают на токоведущие части и закрепляют там этой же штангой или руками, в диэлектрических перчатках.
Операции по наложению и снятию переносных заземлений выполняются с применением диэлектрических перчаток.
При операциях с приводами разъединителей, масляных выключателей и пускорегулирующей аппаратурой; при оперативных переключениях в станциях управления и распределительных пунктах применяются диэлектрические перчатки и коврики.
Запрещается производить сочленение и расчленение штепсельных разъемов кабелей, находящихся под напряжением. Перенос питающего кабеля находящегося под напряжением можно производить только в диэлектрических перчатках или с помощью специальных устройств с изолированными рукоятками. Запрещается пользоваться изолирующими защитными средствами на открытом воздухе при сырой погоде: во время дождя, снега, тумана и изморози. Работа на конвейере во время грозы запрещается. Машина должна быть отключена от сети, а обслуживающий персонал должен находиться в помещениях, пребывание около конвейера запрещается, в темное время суток зона работы конвейера, должна быть достаточно освещена.
Запрещается пользоваться переносными светильниками на напряжение выше предусмотренного на конвейере для цепей местного освещения 12B.
Эксплуатационному персоналу запрещается:
- приступать к работе при обнаружении перед началом работы неисправностей электрооборудования; заземления; питающего кабеля, также при отсутствии сигнализации и защитных средств;
- продолжать работу при обнаружении в процессе работы неисправностей электрооборудования, заземления, питающего кабеля;
- производить осмотры, чистку, смазку, регулировку и ремонт механизмов при работающих электродвигателях. Электрооборудование должно быть отключено от сети с обеспечением двойного разрыва со стороны питания.
- переезжать через лежащий кабель, а также бросать на него тяжести (трубы; доски и т.п.), тормозить руками вращающиеся детали механизмов;
- пролезать через движущиеся детали и механизмы;
- работать с переносной лампой без защитной сетки;
- производить смену ламп при наличии напряжения в патроне;
- производить чистку низковольтных клеммных сборок, контактов и электроаппаратуры находящейся под напряжением, и т.д.
Все работы, связанные с измерением переносными приборами токоизмерительными клещами. мегометром и др. производится в установках напряжением свыше 1000В двумя лицами: одно из которых должно иметь квалификацию не ниже IV группы, а в установках ниже 1000В- одним лицом, с квалификацией не ниже III-й группы.
При работах со снятием напряжения с конвейера или участков схем для выполнения работ следует:
1. отключить напряжение, при этом должны быть обесточены токоведущие части, на которых будут производиться работы.
2. вывесить плакаты на всех рукоятках приводов распредустройств с надписями «не включать ‑ работают люди» и т.д. Снимать плакаты может только то лицо, которое их выносило.
3. Проверить отсутствие напряжения исправным и проверенным указателем напряжения.
4. разрядить кабель от емкостных токов.
5. наложить переносные заземления.
4.8 Требования к пожарной безопасности
Основными причинами возникновения пожаров являются следующие:
- не предусмотрены противопожарные мероприятия: не соблюдена необходимая огнестойкость строительных конструкций, нет молниезащиты и отсутствует заземление от статического электричества, транспортировка горючих жидкостей в открытом состоянии;
- неправильная пожарная профилактика;
- перегрузка и неисправность электрических сетей и электродвигателей, утечка газов в соединениях;
- неосторожное обращение с огнем: курение в запрещенных местах, пользование открытым огнем.
При работе конвейера опасность возникновения пожара в большинстве случаев возникает из-за перегрузок, возникающих в электродвигателях, электрооборудовании, электросетях. В результате этого возможен их нагрев или искрение, что в последствии может привести к короткому замыканию. При коротком замыкании сопротивление электрической цепи уменьшается, приближаясь к нулю и согласно закону Ома электрический ток возрастает до величины много превышающей номинальное значение. По закону Джоуля-Ленца, количество выделяемого тепла пропорционально силе тока, поэтому происходит быстрое выделение тепла, загорается изоляция или другие горючие материалы.
В случае возгорания электрооборудования запрещается тушить его водой, пенными огнетушителями или другими жидкостями. Следует в первую очередь отключить поврежденный участок, тушение пожара производить углекислотными огнетушителями или песком, не касаясь электроустановки.
При тушении электроустановок напряжением свыше 1000 В, в целях предотвращения поражения электрическим током, людям, работающим со стволами, следует надевать поверх электротехнических перчаток перчатки из латунной сетки. Последние заземляют проводом под спецодеждой с подошвами из латуни или меди.
Выводы
Для данного конвейера КЛ5250 проанализированы условия эксплуатации для открытой транспортировки в условиях Днепропетровского и других аналогичных бассейнов.
Представлены требования к вентиляции, освещению, электробезопасности, пожаробезопасности меры безопасности при организации зоны работы конвейера, а также требования к рабочему месту.
При соблюдении вышеуказанных требований, соответствующих ГОСТ 12.2.106-85, условия эксплуатации конвейера наиболее соответствуют нормативным актам по охране труда.