
Рефераты по международному публичному праву
Рефераты по международному частному праву
Рефераты по международным отношениям
Рефераты по культуре и искусству
Рефераты по менеджменту
Рефераты по металлургии
Рефераты по муниципальному праву
Рефераты по налогообложению
Рефераты по оккультизму и уфологии
Рефераты по педагогике
Рефераты по политологии
Рефераты по праву
Биографии
Рефераты по предпринимательству
Рефераты по психологии
Рефераты по радиоэлектронике
Рефераты по риторике
Рефераты по социологии
Рефераты по статистике
Рефераты по страхованию
Рефераты по строительству
Рефераты по таможенной системе
Сочинения по литературе и русскому языку
Рефераты по теории государства и права
Рефераты по теории организации
Рефераты по теплотехнике
Рефераты по технологии
Рефераты по товароведению
Рефераты по транспорту
Рефераты по трудовому праву
Рефераты по туризму
Рефераты по уголовному праву и процессу
Рефераты по управлению
Курсовая работа: Кинематическое и кинетостатическое исследование рычажного механизма
Курсовая работа: Кинематическое и кинетостатическое исследование рычажного механизма
САНКТ-ПЕТЕРБУРГСКИЙ
ГОСУДАРСТВЕННЫЙ МОРСКОЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра деталей машин и ПТМ
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОЙ РАБОТЕ ПО ДИСЦИПЛИНЕ
"Детали машин и ОК", ч.1 "Теория механизмов и машин"
Схема № 9
Санкт-Петербург
2008
Задание на курсовую работу
Схема 9
Произвести кинематическое и кинетостатическое исследование рычажного механизма
Содержание работы
1. Структурный анализ механизма.
2. Кинематическое исследование механизма.
3. Силовой расчет механизма.
1. Структурный анализ рычажного механизма
1.1 Схема рычажного механизма и исходные данные
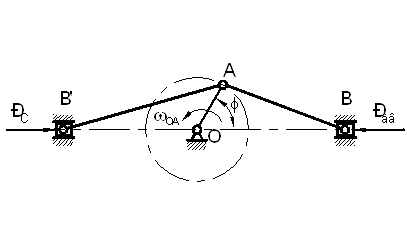
Структурная схема рычажного механизма приведена на рис. 1.
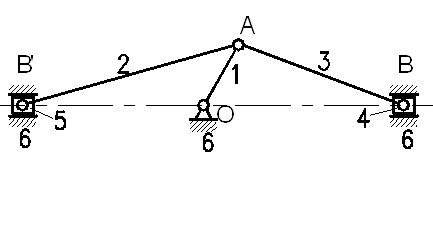
Рис. 1. Структурная схема рычажного механизма
Исходные данные для расчета
Размеры звеньев Масса звеньев
ОА = 140 мм,mOA = 27 кг,
АВ = 150 мм,mAВ = mАВ' = 20 кг,
AB'= 150 мм.mВ = mВ' = 8,5 кг.
Частота вращения кривошипа nOA = 350 об/мин, wOA = const.
Угол расчетного положения кривошипа j = 60°.
Движущая сила Рдв = 5500 Н.
Сила полезного сопротивления Рс = 4200 Н.
1.2 Классификация кинематических пар по четырём признакам
Кинематической парой называется подвижное соединение двух звеньев, ограничивающее их относительное движение.
Кинематические пары механизма показаны на рис. 2.
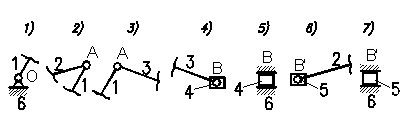
Рис. 2. Кинематические пары
По характеру соприкосновения элементов звеньев кинематические пары являются низшими.
По характеру относительного движения звеньев кинематические пары являются плоскими.
По числу условий связи, наложенных на относительное движение звеньев, кинематические пары являются парами 5-го класса.
По характеру замыкания элементов звеньев кинематические пары являются парами с геометрическим замыканием.
1.3 Определение степени подвижности механизма
Степень подвижности плоского механизма определяется по формуле П.Л. Чебышева
![]() ,
,
где
![]() - число звеньев
механизма,
- число звеньев
механизма, ![]() =
6;
=
6;
![]() ;
;![]() - число
кинематических пар пятого и четвёртого классов,
- число
кинематических пар пятого и четвёртого классов, ![]() =
7,
=
7, ![]() = 0.
= 0.
Подставляя значения параметров в формулу Чебышева, получим
![]() .
.
Число W показывает, скольким звеньям необходимо задать закон движения для получения определенности движения всего механизма. Звено, закон движения которого задан, называется начальным звеном.
В рассматриваемом механизме начальным звеном является кривошип ОА.
1.4 Определение класса и порядка механизма по Ассуру
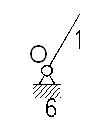
Так как степень подвижности механизма равна единице, то группа начального звена состоит из одного подвижного звена 1 и стойки 6 (рис. 3). Такая группа по классификации Ассура относится к 1-му классу, 1-му порядку.
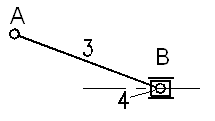
С группой начального звена соединена группа Ассура 3-4 (рис. 4), состоящая из шатуна 3, ползуна 4 и трех кинематических пар 5-го класса. Эта группа относится к 1-му классу, 2-му порядку.
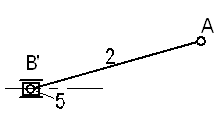
С группой начального звена также соединена группа Ассура 2-5 (рис. 5), состоящая из шатуна 2, ползуна 5 и трех кинематических пар 5-го класса. Эта группа относится к 1-му классу, 2-му порядку.
|
|
|
|
| Рис. 3. Группа начального звена. 1-ый класс, 1-ый порядок |
Рис. 4. Группа Ассура 3-4. 1-ый класс, 2-ой порядок |
Рис. 5. Группа Ассура 2-5. 1-ый класс, 2-ой порядок |
Класс и порядок механизма определяется классом и порядком наиболее сложной группы, входящей в его состав. Следовательно, данный механизм 1-го класса, 2-го порядка.
2. Кинематическое исследование рычажного механизма графо-аналитическим методом
2.1 Построение плана положений механизма
Масштабный
коэффициент длин – это отношение истинной длины кривошипа ОА к длине отрезка в
мм, изображающего его на чертеже. Приняв графическое значение длины кривошипа ![]() = 35 мм, найдем значение Kl:
= 35 мм, найдем значение Kl: ![]()
 .
.
Графические значения линейных размеров находятся как отношения истинных значений к значению масштабного коэффициента длин Kl:
![]() ;
;
![]() .
.
Имея графические значения линейных размеров (длин звеньев АВ и АВ'), строим план 6-ти положений механизма из одной общей точки О вращения кривошипа ОА, начиная с разбивки траектории движения точки А конца кривошипа на 6 равных частей. За 1-ое положение принято правое "мертвое" положение ползуна В. Методом засечек находятся положения всех звеньев механизма для каждого из 6-ти положений кривошипа. На плане положений показаны траектории центров тяжести звеньев АВ и АВ' – точек М и L.
План положений механизма показан на рис. 6 и на чертеже курсовой работы.
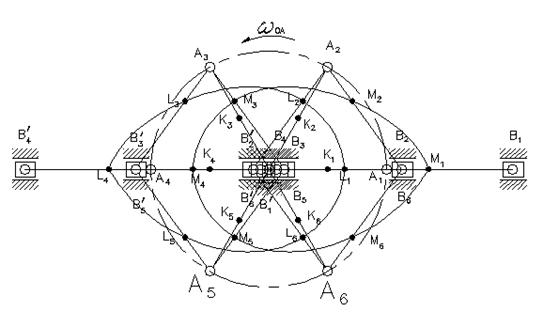
Рис. 6. План положений механизма
2.2.1 Угловая скорость вращения кривошипа определяется по формуле
![]() .
.
2.2.2 Линейная скорость точки А кривошипа равна
![]() .
.
2.2.3
Масштабный коэффициент скорости KV
определяется
как отношение истинного значения скорости точки А кривошипа к длине отрезка в
мм, изображающего эту скорость на чертеже. Приняв графическое значение скорости
![]() = 51,25 мм, найдем значение KV
= 51,25 мм, найдем значение KV
![]() .
.
2.2.4 Для определения скорости точки В составим векторное уравнение
![]() .
.
- Н ВН - Н
В этом уравнении два неизвестных, следовательно, оно решается графически.
Из
плана скоростей находим графические значения скорости точки В и относительной
скорости вращения точки В относительно точки А: ![]() . Истинные
значения этих скоростей равны:
. Истинные
значения этих скоростей равны:
![]() ;
;![]() .
.
Для
положения № 2: ![]() ;
;
![]() .
Для остальных положений механизма значения скоростей VB
и VBA приведены в табл. 1.
.
Для остальных положений механизма значения скоростей VB
и VBA приведены в табл. 1.
2.2.5 Скорость точки В' определяется аналогично из векторного уравнения
![]() ,
,
- Н ВН - Н
в котором также два неизвестных, следовательно, оно решается графически.
Из
плана скоростей находим графические значения скорости точки В' и относительной
скорости вращения точки В' относительно точки А: ![]() . Истинные
значения этих скоростей равны:
. Истинные
значения этих скоростей равны:
![]() .
.
Для
положения № 2: ![]() ;
;
![]() .
Для остальных положений механизма значения скоростей VB'
и VB'A
приведены в табл. 1.
.
Для остальных положений механизма значения скоростей VB'
и VB'A
приведены в табл. 1.
2.2.6 Определение скоростей центров тяжести звеньев:
![]() –
для всех положений;
–
для всех положений;
![]() ;
;![]() .
.
Для
положения № 2: ![]() ;
;
![]() .
Для остальных положений механизма значения скоростей VM
и VL приведены в табл. 1.
.
Для остальных положений механизма значения скоростей VM
и VL приведены в табл. 1.
2.2.7 Определение скоростей точек В, В', М и L в особых ("мертвых") положениях механизма № 1 и № 4.
В этих положениях абсолютные скорости точек В и В' равны нулю
![]() ;
;![]() ,
,
поэтому относительные скорости VBA и VB'A численно равны
скорости точки А, но имеют противоположное направление ![]() ;
; ![]() .
.
Скорости точек М и L в положениях механизма № 1 и № 4 будут равны
VM = VL = 2/3·VA = 2/3·5,125 = 3,42 м/с.
План скоростей для положения № 2 показан на рис. 7, а план скоростей для 6-ти положений механизма приведен на чертеже курсовой работы.
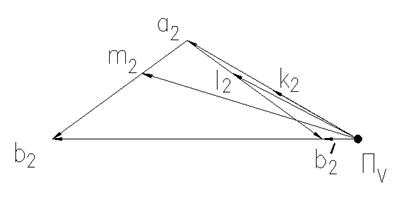
Рис. 7. План скоростей механизма для положения № 2
2.2.8 Определение угловых скоростей звеньев. Угловые скорости звеньев (1/c) определяются по уравнению
![]() .
.
Соответственно для звеньев AB и AB' получаем для положения № 2:
![]() ;
;
![]() .
.
Для остальных положений механизма значения угловых скоростей wAB и wAB' приведены в табл. 1.
Направления угловых скоростей звеньев AB и AB' определяются направлениями относительных скоростей VBA и VB'A.
В табл. 1 приведены значения линейных скоростей точек и угловых скоростей звеньев для 6-ти положений механизма.
Таблица 1
Действительные значения скоростей
|
№ положения |
VA |
VB |
VB' |
VBA |
VB'A |
VL |
VM |
wAB |
wAB' |
| м/c | 1/c | ||||||||
| 1 | 5,125 | 0 | 0 | 5,125 | 5,125 | 3,42 | 3,42 | 34,2 | 34,2 |
| 2 | 5,125 | 7,96 | 0,92 | 4,35 | 4,35 | 3,69 | 5,87 | 29 | 29 |
| 3 | 5,125 | 0,92 | 7,96 | 4,35 | 4,35 | 5,87 | 3,69 | 29 | 29 |
| 4 | 5,125 | 0 | 0 | 5,125 | 5,125 | 3,42 | 3,42 | 34,2 | 34,2 |
| 5 | 5,125 | 0,92 | 7,96 | 4,35 | 4,35 | 5,87 | 3,69 | 29 | 29 |
| 6 | 5,125 | 7,96 | 0,92 | 4,35 | 4,35 | 3,69 | 5,87 | 29 | 29 |
2.3 Построение плана ускорений механизма. Определение ускорений шарнирных точек, центров тяжести звеньев и угловых ускорений звеньев.
2.3.1 Ускорение точки А кривошипа, совершающего равномерное вращательное движение, равно его нормальной составляющей
![]() .
.
2.3.2 Масштабный коэффициент ускорений
![]() ,
,
где
![]() = 62,5 мм – отрезок на чертеже, изображающий ускорение точки А (принято).
= 62,5 мм – отрезок на чертеже, изображающий ускорение точки А (принято).
2.3.3 Ускорение точки В определяется по уравнению
![]()
-Н ВН ВН -Н
Нормальная составляющая относительного ускорения (для положения № 2) равна
![]() , а ее графическое значение
, а ее графическое значение
![]() .
.
Из построения плана ускорений находим касательную составляющую относительного ускорения
![]() ,
,
![]() .
.
Полное относительное ускорение равно векторной сумме нормальной и касательной составляющих
![]() ;
;
![]() ;
;
![]() .
.
Ускорение точки В находим из построения плана ускорений:
![]() ;
; ![]() .
.
2.3.4 Ускорение точки В' определяется по уравнению
![]()
-Н ВН ВН -Н
Нормальная составляющая относительного ускорения (для положения № 2) равна
![]() , а ее графическое значение
, а ее графическое значение
![]() .
.
Из построения плана ускорений находим касательную составляющую относительного ускорения
![]() ,
,
![]() .
.
Полное относительное ускорение равно векторной сумме нормальной и касательной составляющих
![]() ;
;
![]() ;
;
![]() .
.
Ускорение точки В' находим из построения плана ускорений:
![]() ;
; ![]() .
.
2.3.5 Определение ускорений центров тяжести звеньев:
![]() –
для всех положений механизма;
–
для всех положений механизма;
![]() ,
, ![]() – для положения
№ 2;
– для положения
№ 2;
![]() ,
, ![]() – для положения
№ 2.
– для положения
№ 2.
План ускорений для 2-го положения механизма показан на рис. 8, а для всех 6-ти положений – на чертеже курсовой работы.
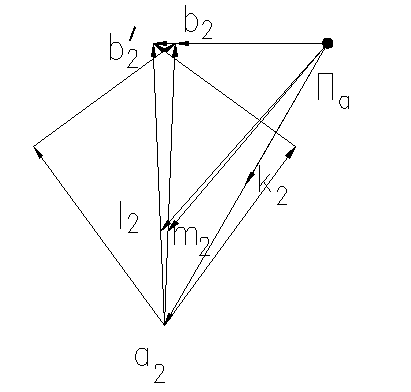
Рис. 8. План ускорений механизма для положения № 2
2.3.6 Определение угловых ускорений звеньев. Угловые ускорения звеньев (1/c2) определяются по уравнению
 .
.
Соответственно для звеньев AB и AB' получаем (для 2-го положения механизма):
![]() ;
;
![]() .
.
Направления угловых ускорений звеньев определяются направлениями касательных составляющих относительных ускорений.
2.3.7 Определение ускорений точек В, В', М и L и угловых ускорений звеньев AB и AB' в особых ("мертвых") положениях механизма № 1 и № 4.
Из уравнений
![]() и
и![]()
вытекает,
что линии действия ускорений точек А, В, и В', а также нормальных составляющих
относительных ускорений ![]() и
и ![]() совпадают (направлены
горизонтально), следовательно касательные составляющие относительных ускорений
совпадают (направлены
горизонтально), следовательно касательные составляющие относительных ускорений ![]() ,
, ![]() , а полные относительные
ускорения aBA
и aB'A
равны
их нормальным составляющим:
, а полные относительные
ускорения aBA
и aB'A
равны
их нормальным составляющим:
![]() ,
,
![]() .
.
Ускорения точек М и L в этих положениях также направлены горизонтально, а концы векторов этих ускорений находятся на 1/3 длины aBA и aB'A от точки А.
Положение № 1:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Положение № 4:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Так как в положениях № 1 и № 4 ![]() и
и ![]() , то угловые
ускорения звеньев AB и AB' равны нулю.
, то угловые
ускорения звеньев AB и AB' равны нулю.
В табл. 2 приведены значения линейных ускорений точек и угловых ускорений звеньев для 6-ти положений механизма.
Таблица 2
Действительные значения ускорений
|
№ положения |
aA |
aB |
aB' |
atBA |
aBA |
atB'A |
aB'A |
aK |
aL |
aM |
eAB |
eAB' |
|
м/с2 |
1/с2 |
|||||||||||
| 1 | 187,5 | 362,95 | 12,05 | 0 | 175,45 | 0 | 175,45 | 93,75 | 129 | 246 | 0 | 0 |
| 2 | 187,5 | 87,39 | 100,11 | 100,74 | 162,51 | 100,74 | 162,51 | 93,75 | 144,6 | 141,81 | 671,16 | 671,16 |
| 3 | 187,5 | 100,11 | 87,39 | 100,74 | 162,51 | 100,74 | 162,51 | 93,75 | 141,81 | 144,6 | 671,16 | 671,16 |
| 4 | 187,5 | 12,05 | 362,95 | 0 | 175,45 | 0 | 175,45 | 93,75 | 246 | 129 | 0 | 0 |
| 5 | 187,5 | 100,11 | 87,39 | 100,74 | 162,51 | 100,74 | 162,51 | 93,75 | 141,81 | 144,6 | 671,16 | 671,16 |
| 6 | 187,5 | 87,39 | 100,11 | 100,74 | 162,51 | 100,74 | 162,51 | 93,75 | 144,6 | 141,81 | 671,16 | 671,16 |
2.4 Построение кинематических диаграмм ползуна В.
Кинематические диаграммы представляют собой графическое изображение кинематических параметров (перемещений, скоростей и ускорений) какого-либо звена исследуемого механизма в функции времени t или угла поворота j начального звена.
Построим кинематические диаграммы ползуна В в функции угла поворота j начального звена.
Для построения кинематических диаграмм S = S(j), V = V(j), a = a(j) ползуна В определяем масштабный коэффициент угла j, приняв его графическое значение равным 120 мм
 ,
,
Принимаем масштабные коэффициенты для построения кривых S = S(j), V = V(j) и a = a(j):
![]() ,
, ![]() ,
,  .
.
За базу отсчета перемещений удобно выбрать одно из "мертвых" положений ползуна В. Примем за базу отсчета правое "мертвое" положение – положение № 1, соответствующее точке В1 на плане положений.
При повороте кривошипа на 60° из положения 1 в положение 2 ползун переместится из точки В1 в точку В2, пройдя расстояние В1-В2. Проведя ординату через точку 2 (см. рис. 9), отложим на ней отрезок В1-В2 в масштабе KS. Аналогично откладываем перемещения ползуна на ординатах, проведенных через точки 3, 4, 5, 6. Соединяя плавной кривой концы отложенных ординат, получим кривую перемещения ползуна В в функции угла поворота кривошипа S = S(j).
Кривые V = V(j) и a = a(j) строим на основании построенных планов скоростей и ускорений, располагая значениями VB и aB, приведенными в табл. 1 и табл. 2.
Кинематические диаграммы ползуна В в функции угла j поворота начального звена показаны на рис. 9 и чертеже курсовой работы.
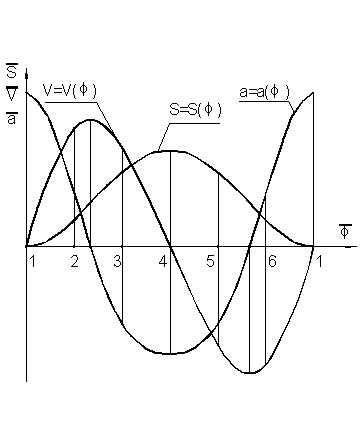
Рис. 9. Кинематические диаграммы ползуна В
рычажный механизм кинематический силовой
3. Силовой расчёт рычажного механизма
Силовой расчет механизма выполняется для положения, заданного углом j = 60°, т.е. для положения № 2.
3.1. Исходные данные для силового расчета.
Движущая сила, действующая на поршень В: Рдв = 5500 Н.
Сила полезного сопротивления, действующая на поршень В': Рс = 4200 Н.
Масса звеньев: mOA = 27 кг, mAВ = mАВ' = 20 кг, mВ = mВ' =8,5 кг.
Ускорения центров тяжести звеньев:
aB = 87,39 м/с2, aB' = 100,11 м/с2, aK = 93,75 м/с2, aM = 141,81 м/с2, aL = 144,6 м/с2.
Угловые ускорения звеньев: eAB = 671,16 1/c2, eAB' = 671,16 1/c2.
3.2 Определение сил тяжести звеньев
Силы тяжести звеньев (Н), определяемые как произведение массы на ускорение свободного падения, равны:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
3.3. Определение сил инерции и моментов сил инерции звеньев
Силы инерции звеньев (Н), определяемые как произведение массы на ускорение центра тяжести, равны:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Силы инерции направлены в сторону, противоположную ускорениям центров тяжести звеньев.
Моменты сил инерции звеньев (Н·м) определяются по уравнению
![]() ,
,
где IS – момент инерции массы звена относительно оси, проходящей через его центр тяжести (кг·м2), e – угловое ускорение звена (1/с2).
Соответственно для звеньев AB и AB' получаем:
![]() ;
;
![]() .
.
Моменты сил инерции направлены в сторону, противоположную угловым ускорениям звеньев.
3.4 Расчёт группы Ассура 2-5.
Схема
нагружения группы Ассура 2-5 силами и моментами, под действием которых она
находится в равновесии, изображена в масштабе длин ![]() (рис.
10).
(рис.
10).
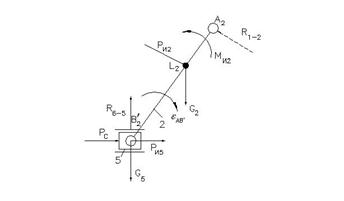
Рис. 10. Схема нагружения группы Ассура 2-5
В данной группе неизвестны реакции в кинематических парах R6-5, R1-2 и R2-5 = - R5-2, которые можно найти из уравнений равновесия звеньев и группы в целом.
1.
![]() ;
;
![]() ,
,
где
плечи сил, снятые с чертежа (мм) и пересчитанные с учетом масштабного коэффициента
длин ![]() в истинные значения (м):
в истинные значения (м):
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Тогда

Реакция R1-2 может быть найдена сразу (по величине и направлению) из векторного уравнения равновесия группы
2.
![]() , или
, или
![]() .
.
Принимаем масштабный коэффициент сил КР = 70 Н/мм. Графические значения сил определяются как отношение истинных значений к величине КР, например:
![]() .
.
Построим векторный многоугольник – план сил группы Ассура 2-5 (рис. 11 и чертеж курсовой работы), из которого
![]() .
.
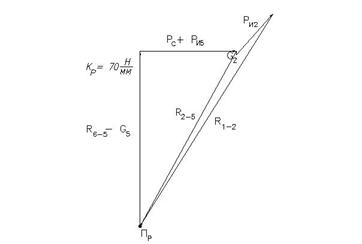
Рис. 11. План сил группы Ассура 2-5
Из
условия равновесия ползуна 5 найдем реакцию во внутренней кинематической паре ![]() :
:
3.
![]() , или
, или
![]() .
.
Решив
это векторное уравнение на том же многоугольнике сил (рис. 11), найдем искомую
реакцию ![]() .
.
3.5 Расчёт группы Ассура 3-4
Схема
нагружения группы Ассура 3-4 силами и моментами, под действием которых она
находится в равновесии, изображена в масштабе длин ![]() (рис.
12).
(рис.
12).
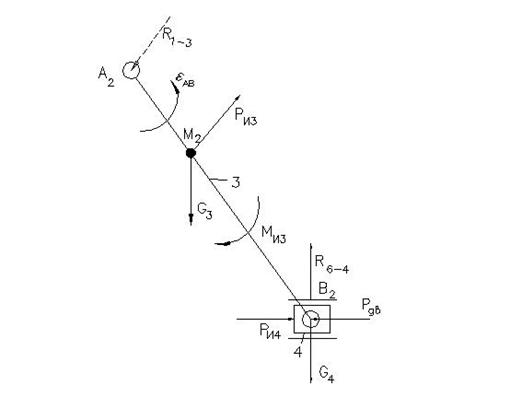
Рис. 12. Схема нагружения группы Ассура 3-4
В данной группе неизвестны реакции в кинематических парах R6-4, R1-3 и R3-4 = - R4-3, которые можно найти из уравнений равновесия звеньев и группы в целом.
1.
![]() ;
;
![]() ,
,
где
плечи сил, снятые с чертежа (мм) и пересчитанные с учетом масштабного коэффициента
длин ![]() в истинные значения (м):
в истинные значения (м):
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Тогда

Реакция R1-3 может быть найдена сразу (по величине и направлению) из векторного уравнения равновесия группы
2.
![]() , или
, или
![]() .
.
Принимаем масштабный коэффициент сил КР = 70 Н/мм. Графические значения сил определяются как отношение истинных значений к величине КР, например:
![]() .
.
Построим векторный многоугольник – план сил группы Ассура 3-4 ((рис. 13 и чертеж курсовой работы), из которого
![]() .
.
Из
условия равновесия ползуна 4 найдем реакцию во внутренней кинематической паре ![]() :
:
3.
![]() , или
, или
![]() .
.
Решив это уравнение на том же плане сил (рис. 13), найдем искомую реакцию
![]() .
.
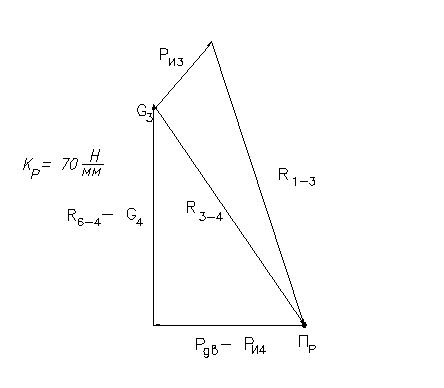
Рис. 13. План сил группы Ассура 3-4
3.6 Расчёт группы начального звена
Схема
нагружения группы начального звена силами и моментами, под действием которых
она находится в равновесии, изображена в масштабе длин ![]() (рис. 14 чертеж курсовой
работы). Действие группы Ассура 2-5 представлено реакцией R2-1,
равной и противоположно направленной реакции R1-2,
найденной в п.п. 3.4; действие группы Ассура 3-4 представлено реакцией R3-1,
равной и противоположно направленной реакции R1-3,
найденной в п.п. 3.5.
(рис. 14 чертеж курсовой
работы). Действие группы Ассура 2-5 представлено реакцией R2-1,
равной и противоположно направленной реакции R1-2,
найденной в п.п. 3.4; действие группы Ассура 3-4 представлено реакцией R3-1,
равной и противоположно направленной реакции R1-3,
найденной в п.п. 3.5.
В данной группе неизвестны реакция со стороны стойки на начальное звено R6-1 и уравновешивающий момент МУР, которые можно найти из уравнений равновесия группы.
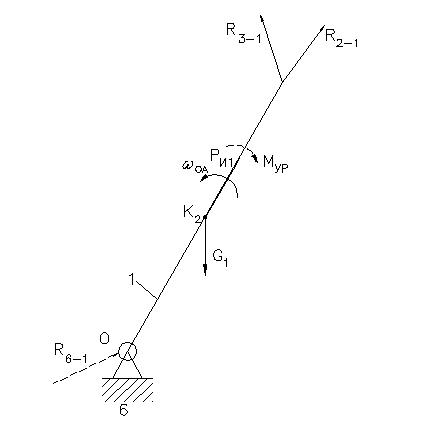
Рис. 14. Схема нагружения группы начального звена
Уравновешивающий момент Мур может быть найден из уравнения моментов, составленного относительно шарнира О:
1.
![]() , то есть
, то есть
![]() ,
,
где
![]() ;
;
![]() ;
;
![]() .
.
Тогда МУР будет равен:
![]()
Реакция R6-1 найдется из векторного уравнения:
2.
![]() , или
, или
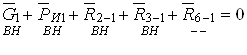 .
.
Примем КР =20 Н/мм и построим векторный многоугольник – план сил группы начального звена (рис. 15 и чертеж курсовой работы).
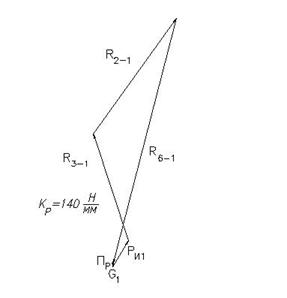
Рис. 15. План сил группы начального звена
Истинное значение реакции R6-1 равно:
![]() .
.
3.7 Определение уравновешивающего момента по методу “жесткого рычага” Жуковского Н.Е.
Схема нагружения "жесткого рычага" – повернутого на 90° плана скоростей механизма показана на рис. 16 и чертеже курсовой работы. При этом моменты разложены на пары сил; составляющие пар сил определяются по выражениям:
![]() ,
,
где МИ и МУР – момент сил инерции и уравновешивающий момент (Нм); l – длина звена (м).
Для данного механизма имеем:
![]() ;
;
![]() .
.
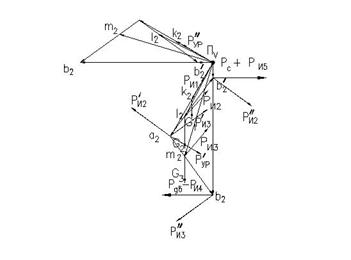
Рис. 16. Схема нагружения "жесткого рычага" Жуковского
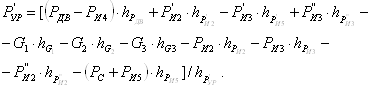
Условие равновесия "жесткого рычага" Жуковского:
![]() , или
, или
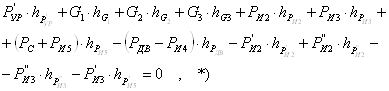
Силы G4 и G5 на рис.16 не показаны (приложены в (·) b2 и b'2, направлены вертикально вниз).
Тогда
Плечи сил, снятые с чертежа:
![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Такая точность измерения плечей возможна при выполнении чертежа в какой-либо автоматизированной системе, например, в системе AutoCAD (см. чертеж курсовой работы).
Подставляя числовые значения сил, получим
P'УР = [(5500 – 742,82)·79,56 + 352,3·50,96 - 352,3·20,79 + 352,3·64,31 – 264,6·12,81 – 196·17,09 –196·17,09 – 2892·8,87 – 2836,2·23,21 – 352,3·7,44 –(4200 + 850,94)·9,21] / 51,25 = 5093,8 Н.
Уравновешивающий момент
![]() .
.
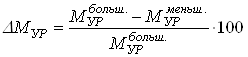
Определив значение уравновешивающего момента по методу "жесткого рычага" Жуковского, следует найти расхождение в значениях уравновешивающего момента, полученных по методу кинетостатики и по "рычагу" Жуковского:
 %.
%.
В нашем случае большее значение уравновешивающего момента Мур = 63,12 Н·м получено по "рычагу" Жуковского, меньшее Мур = 62,5 Н·м – по методу кинетостатики. Погрешность расчета равна:
![]() .
.
Силовой
расчет механизма выполнен правильно, т.к. погрешность ![]() .
.
Список использованных источников
1. Егорова В.И., Вороковская А.П. Теория механизмов и машин. Структура, кинематика и динамика шарнирно-рычажных механизмов: Учебное пособие. Л.: Изд. ЛКИ, 1981.
2. Яковлев В.П., Половинкина Н.Б. Практикум по теории механизмов и машин. Ч. 1.: Методические указания. Л.: Изд. ЛКИ, 1983.
3. Конспекты лекций и практических занятий.