
Рефераты по международному публичному праву
Рефераты по международному частному праву
Рефераты по международным отношениям
Рефераты по культуре и искусству
Рефераты по менеджменту
Рефераты по металлургии
Рефераты по муниципальному праву
Рефераты по налогообложению
Рефераты по оккультизму и уфологии
Рефераты по педагогике
Рефераты по политологии
Рефераты по праву
Биографии
Рефераты по предпринимательству
Рефераты по психологии
Рефераты по радиоэлектронике
Рефераты по риторике
Рефераты по социологии
Рефераты по статистике
Рефераты по страхованию
Рефераты по строительству
Рефераты по таможенной системе
Сочинения по литературе и русскому языку
Рефераты по теории государства и права
Рефераты по теории организации
Рефераты по теплотехнике
Рефераты по технологии
Рефераты по товароведению
Рефераты по транспорту
Рефераты по трудовому праву
Рефераты по туризму
Рефераты по уголовному праву и процессу
Рефераты по управлению
Реферат: Гирокомпас Вега
Реферат: Гирокомпас Вега
Курсовая работа на тему:
"Гирокомпас Вега"
Владивосток
2000
Введение
Одной из характерных черт развития современного морского флота является повышение скорости судов.Это поставило перед навигационным оборудованием сложную задачу — обеспечить безопасность мореплавания судов такого типа. В решении этой задачи важное место занимает создание гирокомпасов, которые могли бы при высокой скорости, а следовательно, и лучшей маневренности судов, вырабатывать истинный курс с высокой точностью. Этому требованию в большой степени отвечают гирокурсоуказатели с электромагнитным управлением.
Основное отличие гирокомпасов с электромагнитным управлением от ранее известных типов заключается в том, что в них в качестве чувствительного элемента (ЧЭ) используется астатический гироскоп, а для придания ему компасных свойств применяются датчики моментов, действующих по осям прецессии гироскопа в зависимости от угла отклонения его главной оси от плоскости горизонта.
Угол отклонения главной оси гироскопа измеряется физическим маятником, установленным на камере гироскопа, но не накладывающим моментов на гироскоп. Такой маятник (его лучше называть индикатором горизонта) вырабатывает электрический сигнал, пропорциональный углу отклонения главной оси гироскопа от плоскости горизонта. После соответствующего преобразования этот сигнал используется для возбуждения датчиков момента.
В обычных гирокомпасах измерение угла отклонения главной оси гироскопа от плоскости горизонта и наложение управляющих моментов на гироскоп выполняются одним элементом — физическим маятником, жестко связанным с гироскопом или гироскопическим ЧЭ — гиросферой. Если понимать под методом управления гироскопом способ наложения управляющих моментов, то в отличие от классических гирокомпасов с непосредственным управлением от физического маятника схему нового гирокомпаса, у которого физический маятник играет роль только индикатора горизонта, часто называют гирокомпасом с косвенным управлением. В этом гирокомпасе ЧЭ — трехстепенной поплавковый гироскоп, связь которого с Землей осуществляется посредством индикатора горизонта, а наложение управляющих моментов на гироскоп производится через торсионы при помощи следящих приводов. В зависимости от характера управляющих моментов курсоуказатель может работать в двух режимах: гирокомпаса и гироазимута — гироскопа направления.
ТТХ гирокомпаса «Вега»
«Вега» является двухрежимным корректируемым гироскопическим курсоуказателем (ГКУ) с косвенным управлением. Этот малый по размерам прибор со сравнительно высокими точностными, параметрами рассчитан на работу в условиях больших инерционных возбуждений.
Подвес чувствительного элемента жидкостно-терсионный. Период незатухающих колебаний в расчетной (60°) широте «150 мин. Нормальная работа ГКУ возможна в широтах до 80° в одном из режимов: ГК (основной режим) при скорости до 50 уз и гироазимут (вспомогательный режим) до 70 уз.
Точность показаний ГКУ в режиме ГК при различных условиях плавания в широтах меньше 70° характеризуется следующими цифрами: погрешность на неподвижном судне ± 0,5°; погрешность на прямом курсе при постоянной скорости до 30 уз и качке с амплитудой 2°±0,8°, с амплитудой 25° ± 1,5°, погрешность при маневрировании на скоростях до 30 уз достигает ±2°. Вообще ГКУ выдерживает воздействие качки с амплитудой 45° и рыскания судна со скоростью 12° в секунду при амплитуде рыскания 30°. В режиме гироазимута допустимая скорость дрейфа ±1° в час. Время ускоренного приведения ГКУ в меридиан 60 мин. Предельная погрешность синхронной передачи ±0,1°. В связи с высокой рабочей температурой поддерживающей жидкости (75°С) введен электрический подогрев. Гарантийный срок работы гироблока 10000 ч. Время непрерывной работы ГКУ 2000 ч.
Питание ГКУ осуществляется от судовой сети трехфазного переменного тока (380 или 220 В, 50 Гц).
Устройство и принцип работы курсоуказателя.
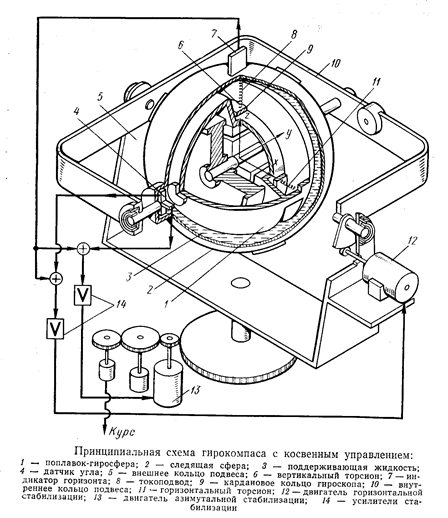
Принципиальное устройство двухрежимного курсоуказателя с электромагнитным управлением показано на рис. 1.1.
Гиромотор заключен в герметически запаянную сферу — поплавок 1, состоящую из двух полусфер, соединенных между собой короткой цилиндрической шейкой. Гиросфера помещена во внешнюю следящую сферу 2, и пространство между ними заполнено тяжелой вязкой (поддерживающей) жидкостью 3. Плотность поддерживающей жидкости и вес гиросферы выбраны так, что при определенной температуре жидкости гиросфера приобретает нейтральную плавучесть. Рабочая температура поддерживается автоматически системой терморегулирования.
Гиросфера связана со следящей сферой двумя парами торсионов, которые служат для наложения на гироскоп управляющих моментов и центрирования гиросферы относительно следящей сферы. Вертикальные торсионы 6 одним концом закреплены в корпусе следящей сферы, а другим — в кардановом кольце 9, свободно охватывающем шейку гиросферы. Горизонтальные торсионы 11 одним концом прикреплены к оболочке гиросферы, а другим—к карданному кольцу гироскопа. Жесткость на кручение пары вертикальных торсионов и жесткость пары горизонтальных торсионов рассчитаны определенным образом, исходя из конструктивных параметров прибора.
Все четыре торсиона установлены в плоскости, перпендикулярной оси собственного вращения гироскопа, и позволяют следящей сфере поворачиваться относительно гиросферы .вокруг горизонтальных или вертикальных торсионов и вместе с оболочкой гиросферы — вокруг оси кинетического момента.
Питание на гиромотор и статоры двухкомпонентных датчиков угла 4, расположенных по оси собственного
вращения гироскопа на противоположных сторонах гиросферы 1, подается по гибким спиральным токоподводам 8, свободно навитым вокруг торсионов или через сами торсионы.
Следящая сфера 2 имеет снаружи цапфы, расположенные параллельно оси собственного вращения гироскопа, посредством которых она свободно подвешена на подшипниках в горизонтальном внутреннем кольце 10 стабилизированного карданова подвеса.
Горизонтальное кольцо 10 подвешено по оси, параллельной оси горизонтальных торсионов, в вертикальном внешнем кольце подвеса 5, которое может поворачиваться вокруг вертикальной оси, образованной подшипниками, установленными в корпусе прибора. Прибор своим основанием крепится к палубе.
Вертикальное кольцо 5 приводится во вращение через зубчатую передачу двигателем азимутальной стабилизации 13, установленным в корпусе прибора. Это вращение передается на вертикальные торсионы, которые накладывают на гироскоп вертикальный момент. В вертикальном кольце .5 установлен двигатель горизонтальной стабилизации 12, который через зубчатую передачу поворачивает горизонтальное кольцо 10 вокруг его оси подвеса, закручивая горизонтальные торсноны и накладывая таким образом на гироскоп горизонтальный момент. Стабилизация следящей сферы в горизонте вокруг оси ее подвеса осуществляется смещением вниз центра тяжести сферы относительно оси подвеса.
Двухкомпонентные индукционные датчики угла, статоры которых расположены на гиросфере 1, а съемные (роторные) обмотки закреплены на следящей сфере 2, вырабатывают напряжения, пропорциональные углам рассогласования между гиросферой и следящей сферой относительно вертикальных и горизонтальных торсионов. Датчики угла включены по дифференциальной схеме, что исключает погрешности в измерении углов рассогласования, вызываемые линейными перемещениями гиросферы относительно следящей сферы. Сигналы рассогласования от датчиков угла через усилители стабилизации 14, расположенные в самом приборе, поступают на соответствующие двигатели, которые обеспечивают непрерывные согласования следящей сферы 2 с гиросферой /. Таким образом, прибор работает в режиме свободного гироскопа.
Для превращения свободного гироскопа в гирокомпас необходимо наложить на гироскоп моменты вокруг горизонтальной xx и вертикальной zz осей, пропорциольные углу отклонения главной оси гироскопа от плоскости горизонта.
Связь гироскопа с плоскостью горизонта осуществляется при помощи индикатора горизонта 7, представляющего собой высокочувствительный физический маятник с индукционным съемом сигнала, задемпфированный вязкой жидкостью.
Индикатор горизонта 7 можно установить непосредственно на гиросфере 1 или следящей сфере 2. Однако из конструктивных соображений он установлен на следящей сфере так, что реагирует только на отклонения оси подвеса yy следящей сферы от плоскости горизонта и вырабатывает напряжение, пропорциональное этому отклонению. Сигнал индикатора горизонта 7 суммируется в противофазе с сигналами датчиков угла, и разность этих сигналов подается через усилители на двигатели стабилизации 12 или 13.
Двигатели 12, 13 приводят во вращение следящую сферу 2 относительно горизонтальных и вертикальных торсионов до тех пор, пока сигнал индикатора горизонта 7, поданный в схему суммирования в определенном масштабе, не сравняется с сигналом от соответствующего датчика угла. Горизонтальные и вертикальные торсионы окажутся закрученными на углы, пропорциональные углу отклонения главной оси гироскопа от горизонта, что обеспечивается схемой суммирования сигналов. Момент, прикладываемый вследствие этого горизонтальными торсионами 11 к гироскопу, аналогичен маятниковому моменту обычных маятниковых гирокомпасов. Под действием этого момента гироскоп прецессирует в азимуте, совершая незатухающие колебания около меридиана.
Момент, прикладываемый вертикальными торсионами 6, аналогичен демпфирующему моменту маятниковых гирокомпасов, под действием которого гироскоп прецессирует к горизонту. В результате совместного действия этих моментов гироскоп, совершая затухающие колебания, период и фактор которых зависят от выбранных параметров прибора, будет приходить в меридиан.
Для перехода от режима гирокомпаса в режим гпроазимута достаточно лишь отключить горизонтальный маятниковый момент, сохранив вертикальный момент, необходимый для удержания оси гироскопа в плоскости горизонта. Практически это осуществляется простым поворотом ручки переключателя режимов, установленного в приборе. Для компенсации методических ошибок, возникающих в показаниях прибора при работе в режимах гирокомпаса и гиро-азимута, в приборе имеется электромеханическое счетно-решающее устройство, которое вырабатывает необходимые сигналы, поступающие на двигатели стабилизации.
Величины корректирующих моментов, прикладываемых по обеим осям гироскопа в результате ввода сигналов в следящие системы, изменяются в зависимости от скорости, курса и широты таким образом, что главная ось гироскопа удерживается в направлении на N как в режиме гирокомпаса, так и в режиме гироазимута. Показания курса, выработанного прибором, транслируются датчиками грубого и точного отсчета, например сельсинами, связанными с двигателем азимутальной стабилизации.
Особенности работы курсоуказателя в режиме гирокомпаса.
Схема управления. Для того чтобы дать общее представление об устройстве гирокомпаса с электромагнитным управлением и объяснить наиболее интересные особенности его работы, воспользуемся лишь самыми необходимыми теоретическими положениями
Уравнения движения гирокомпаса с управлением ЧЭ посредством торсионов (см. рис.1) при обычно принимаемых упрощениях можно представить выражениями:
Н [da /dt-(u cosj +VE /R)b + (u sinj +VE /R tgj)] = СГ(b -bc); (1.1)
Н [db /dt-VN /R+(u cosj +VN /R)a] =-СB (a -ac);
где Н — кинетический момент гироскопа;
b — угол отклонения гироскопа от горизонта в вертикальной плоскости;
a — угол отклонения гироскопа от меридиана в горизонтальной плоскости;
aс, bс — координаты следящей сферы, отсчитываемые аналогично координатам a и b гироскопа;
j — широта места;
и — угловая скорость вращения Земли;
R — радиус Земли;
VN ,VE — северная и восточная составляющие скорости судна;
(b -bc) —угол рассогласования следящей сферы относительно ги-росферы вокруг горизонтальных торсионов, т. е. угол закрутки горизонтальных торсионов, обладающих жесткостью Сг;
(a -ac)—угол рассогласования следящей сферы относительно гиросферы, т. е. угол закрутки вертикальных торсионов, обладающих жесткостью Св;
Если углы закрутки (b—bc) и (a—ac), а следовательно, горизонтальный Сг(b—bс) и вертикальный Св (a—aс) моменты, прикладываемые к гироскопу, будут пропорциональны углу отклонения главной оси гироскопа от горизонта и соответствующим образом подобраны по величине и направлению, то курсоуказатель будет работать в режиме гирокомпаса. Величины и направления моментов определяются крутизной сигналов датчиков угла и индикатора горизонта и схемой их суммирования.
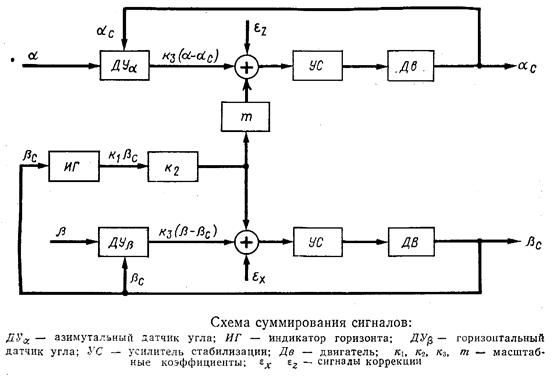
Один из возможных вариантов схемы суммирования сигналов показан на рис. 1.2. Эта схема, в которой применен индикатор горизонта с большой постоянной времени, позволяет осуществить следующее суммирование сигналов:
k3(b—bс ) - k1 k2bс=0 (1. 2)
k3(a -ac) – m k1 k2bс=0 (1. 3)
где k3 – крутизна сигнала датчиков угла;
k1 – крутизна сигнала индикатора горизонта;
k2 и m – масштабные коэффициенты.
Для простоты постоянную постоянную времени индикатора горизонта не учитываем.
Обозначив через n=k1k2/( k1k2+k3 ) , преобразуем выражения (1. 2) и (1. 3) в равенства:
(b—bс)=nb ; (a -ac)=mnb , (1. 4)
из которых следует, что на вход усилителей следящих систем поступает управляющий сигнал, пропорциональный углу b . Кроме того, на схеме суммирования показана возможность введения в систему сигналов коррекции eх и ez, о выборе которых будет сказано ниже.
Имея в виду, что частота собственных колебаний следящих систем значительно больше частоты собственных колебаний гиро-сферы, а переходный процесс в них затухает очень быстро, в уравнениях движения гирокомпаса можно оперировать соотношениями (1.4), которые не учитывают динамики следящих систем. Подставляя равенства (1.4) в выражения (1.1), получим уравнения, идентичные уравнениям обычного гирокомпаса с физическим маятником.
Анализируя эти уравнения, нетрудно найти, что период собственных колебаний гирокомпаса определяется выражением
Т = 2p . V H / Cг n u cosj , (1. 5)
а коэффициент затухания :
h =Cв m n /H. (1. 6)
Очевидно, что величины периода колебаний и коэффициента за-гухания зависят не только от кинетического момента гиросферы Н и жесткостей Сг и Св, но и от коэффициентов п и т, характеризующих масштаб моментов, прикладываемых к гироскопу, по отношению к углу отклонения главной оси гироскопа от плоскости горизонтаb . Если в обычном маятниковом гироскопе момент прямо пропорционален углу b , а величина его равна Р1b , где Р1— максимальный маятниковый момент, то в гирокомпасе с электромагнитным управлением зависимость момента от угла b определялась бы выражением Рlnb.
Меняя коэффициент п, можно изменять масштаб маятникового момента, а меняя коэффициент т — масштаб демпфирующего момента, и тем самым изменять величину периода незатухающих колебаний и коэффициента затухания.
Такая принципиальная и техническая возможность позволяет сравнительно просто решать следующие задачи:
ускоренное приведение гирокомпаса в меридиан, для чего необходимо уменьшить период незатухающих колебаний:
получение приемлемой точности курсоуказания при маневрировании, для чего, как известно, нужно увеличить период.
Для уменьшения периода коэффициент n следует увеличивать, а для увеличения периода — уменьшать.
Изменение коэффициента п можно осуществлять в схеме суммирования путем изменения масштабного коэффициента k2, который специально введен в схему, поскольку коэффициенты k1 и k3 для данной конструкции постоянны. Однако при такой схеме суммирования, которая показана на рис.2, диапазон изменения коэффициента п ограничен.
Действительно, преобразуя выражение для n к виду
n=1/(k3 / k1k2+1) (1. 7)
нетрудно убедиться, что при увеличении k2 величина n приближается к единице. Это означает, что крутизна момента не может быть больше жесткости горизонтальных торсионов Сг, которая и будет определять величину наименьшего периода собственных колебаний гирокомпаса.
Что же касается наибольшего периода, то его величина ограничивается практически значениями возмущающихся моментов, которые возникают вследствие статических ошибок следящих систем и нелинейности характеристик датчиков угла и индикатора горизонта. При соизмеримости величин этих моментов с управляющими моментами система теряет свои качества и становится неработоспособной.
Работа следящих систем. Для правильного функционирования гирокомпаса наряду со схемой управления существенным является надлежащая работа следящих систем, от которых требуется высокая точность и большое быстродействие. Эти требования вытекают, как следствие, из самого принципа работы гирокомпаса, устройство которого рассмотрено выше.
Азимутальная н горизонтальная следящие системы выполняют в гирокомпасе две основные функции:
управление гироскопом путем наложения моментов через торсионы, которые непрерывно удерживаются закрученными на определенный угол;
слежение за гироскопом путем отработки всех угловых перемещений корпуса прибора, которые передаются на следящую сферу, вызывая рассогласование между гироскопом и следящей сферой.
При угловых перемещениях судна карданов подвес вместе с корпусом прибора как бы обкатывается вокруг гироскопа, который в режиме гирокомпаса, благодаря своим свойствам, остается неподвижным относительно системы координат, связанной с Землей, если не принимать во внимание переносного движения вместе с судном.
Наличие статических ошибок в следящих системах приводит к наложению на гироскоп возмущающих моментов, величины которых прямо пропорциональны статической ошибке и жесткости торсионов. В результате этого в показаниях прибора возникают погрешности, допустимые значения которых могут быть получены лишь при весьма малых статических ошибках следящих систем.
Воздействие на прибор всякого рода периодических несимметричных возмущений, например качки, может привести к появлению постоянных составляющих в динамических ошибках следящих систем и, как следствие, к дополнительным погрешностям в показаниях прибора. Поэтому к следящим системам гирокомпаса должны предъявляться очень высокие требования.
Что касается влияния собственных колебаний следящих систем на работу гирокомпаса, то поскольку частота этих колебаний значительно больше частоты собственных колебаний гиросферы, а переходный процесс в следящих системах при правильном выборе параметров затухает очень быстро, влияние колебании следящих систем практически не должно сказываться.
Однако выбранная для двухрежимного курсоуказателя конструктивная схема подвеса ЧЭ обусловливает взаимное влияние азимутальной и горизонтальной следящих систем при наличии наклонов следящей сферы вокруг оси ее подвеса, совпадающей с осью кинетического момента гироскопа—с осью уу (см. рис.1).
При таких наклонах, благодаря жесткой связи гиросферы со следящей сферой посредством торсионов, оси горизонтальных и вертикальных торсионов будут рассогласованы с осями приложения моментов от соответствующих двигателей на некоторый угол g.
Упрощая физику явления и принимая во внимание малость углов закрутки горизонтальных (b—bс) и вертикальных (a -ac) торсионов, измеряемых датчиками угла, и приведенных углов поворота осей двигателей горизонтальной db и азимутальной da стабилизации, связь между этими углами можно выразить формулами:
(b—bс)=db cosg +da sing g . ; (a -ac)= da cosg +db cos (1. 8)
Формулы (1.8) характеризуют взаимное влияние горизонтальной и азимутальной следящих систем при наклоне следящей сферы. Как показывает анализ, наличие перекрестных связей приводит к неустойчивости следящих систем, если не принять специальных мер. Наиболее простым способом, обеспечивающим устойчивость системы при любых углах g, является полное устранение перекрестных связей путем включения в контуры следящих систем преобразователя координат. В качестве преобразователя координат используется синусно-косинусный вращающий трансформатор (СКВТ), который включается в цепи следящих систем между датчиками угла и усилителями по схеме, показанной на рис.3.
Поступающее на входные обмотки преобразователя координат напряжение U, пропорциональное углам закрутки соответствующих торсионов, будет связано с приведенными углами поворота осей двигателей следующими уравнениями:
db=Ub cosg + Ua sing ; da= Ua cosg + Ub sing (1. 9)
в которых напряжение Ub пропорционально углу (b—bс) и Ua пропорционально углу (a -ac).
Решив уравнения (1.8) и (1.9) совместно, нетрудно убедиться, что соотношения между углами закрутки торсионов и углами поворота соответствующих двигателей не зависят от утла наклона следящей сферы, т. е. горизонтальная и азимутальная следящие системы полностью развязаны.
 |
Скоростная девиация. Для того чтобы определить положение равновесия гирокомпаса при движении судна прямым курсом с постоянной скоростью, найдем частные решения системы уравненийи (1.1) и (1.3), полагая при этом
Сгn»H(и соsg +VE /R), (1. 10)
что легко достигается соответствующим выбором параметров: прибора. В положении равновесия имеем:
a*=VN /R(u cosj+VE /R) - CB m tgj /Cг;
a*с=a*- mH / Cг(u sinj+ VE tgj /R); (1. 11)
b*=H / Cг n(u sinj+ VE tgj /R); .
b*с=H(1-n) / Cг n (u sinj+ VE tgj /R). .
Таким образом, ЧЭ гирокомпаса при движении судна с постоянной скоростью приходит в определенное положение равновесия, которое по координатам a и b практически ничем не отличается от положения равновесия одногироскопного маятникового гирокомпаса с демпфированием посредством момента, направленного по вертикальной оси гироскопа, как это сделано, например, в маятниковых гирокомпасах «Сперри».
Действительно, отклонение гироскопа в азимуте a* складывается из скоростной девиации, определяемой приведенным выше выражением (первый член в формуле для a*), и так называемой широтной девиации (второй член той же формулы). При скоростях движения корабля около 60 узлов в широтах 70—80° значения скоростной и широтной девиаций будут достигать столь больших величин, что их компенсация известными методами становится практически невозможной.
Учитывая, что значения курса в двухрежимном гирокомпасе в силу его конструктивных особенностей можно снимать лишь с картушки (или датчика), связанной со следящей сферой, т. е. по координате ac, для компенсации скоростной и широтной девиаций можно использовать метод, сущность которого сводится к следующему.
Если на входы усилителей следящих систем вместе с сигналами от датчика угла подать определенные сигналы коррекции аналогично тому, как это делается с сигналом индикатора горизонта, то к гироскопу по обеим осям стабилизации будут приложены соответствующие корректирующие моменты. В этом случае выражения (1.4) можно записать:
(b—bс)=n b +ex ; (a -ac)=m n b +ez . (1. 12)
гдеex и ez; — сигналы коррекции, являющиеся функциями широты и скорости судна.
Для нахождения этих функций воспользуемся системой четырех уравнений (1.1) и (1.12), в которую входит шесть неизвестных функций a ,ac ,b ,bс ,ex ,ez —две из них можно-задать произвольно.
Для получения от гирокомпаса истинного курса зададимся следующими произвольными значениями координатac и b в положении равновесия:
ac =0; b*=0. (1. 13)
Это условие означает, что в положении равновесия нуль следящей сферы будет в плоскости меридиана, а ось кинетического момента гироскопа — в плоскости горизонта.
Частные решения системы уравнений (1.1), (1.12) с учетом условия (1.13) дают формулы сигналов коррекции:
ez = VN / (R u cosj +VE +CвR /H) ; ex = H /Cг(u sinj +VE tgj /R), (1. 14)
и выражения для положения равновесия по двум другим координатам будут:
a* = VN / (R u cosj +VE +CвR /H) ; (1. 15)
b* = - H /Cг(u sinj +VE tgj /R), (1. 16)
Следовательно, при вводе в схему управления сигналов коррекции ez и ex , определяемых выражениями (1.14), из показаний гирокомпаса полностью исключаются скоростная и широтная девиации. Кроме того, величина отклонения оси кинетического момента гироскопа от меридиана a*, определяемая формулой (1.15), резко уменьшается по сравнению со скоростной девиацией, имевшей место до ввода коррекции, и при скорости порядка 60 узлов в широте 70° достигает всего 0°,2.
Уменьшение скоростной девиации гиросферы a* обусловлено наложением вертикального корректирующего момента ez.
Баллистические девиации. Природа баллистических девиаций курсоуказателя в режиме гирокомпаса в принципе та же, что и у обычных маятниковых гирокомпасов. Разница только в том, что возникающие во время маневрирования ускорения не возмущают гироскоп, поскольку он астатический и обладает нейтральной плавучестью, а воздействуют на индикатор горизонта, который при этом вырабатывает дополнительный сигнал, пропорциональный величине dVN /g dt , т. е. пропорциональный северной составляющей ускорения.
Этот сигнал вызовет соответствующее закручивание горизонтальных и вертикальных торсионов, которое будет продолжаться в течение всего времени действия ускорения, и в результате приведет к отклонению гиросферы от положения равновесия, в котором она находилась до начала маневрирования. По окончании действия ускорения гиросфера, совершая затухающие колебания, начнет приходить к своему положению равновесия.
Аналогично тому, как это делается для обычного маятникового гирокомпаса, можно и для двухрежимного гирокомпаса найти условие апериодического перехода в новое положение равновесия или «условие невозмущаемости».
Исследования показывают, что в отличие от маятникового гирокомпаса апериодический переход гирокомпаса с электромагнитным управлением в новое положение равновесия теоретически можно получить при значении периода незатухающих колебаний, отличающемся от периода Шулера, который как известно, равен 84,4 мин.
Его величина приближенно, без учета собственной скорости судна, определяется следующим соотношением:
Ta=84,4 V(H u cosj +Cв) /H u cosj (1. 17)
и может составлять несколько сотен минут.
Эта особенность двухрежимного гирокомпаса с торсионно-жидкостным подвесом ЧЭ объясняется тем, что в отличие от обычных гирокомпасов на гироскоп с помощью упругой связи во время маневрирования накладываются корректирующие моменты по вертикальной оси.
В гирокомпасах такого типа, где скоростная девиация компенсируется наложением момента, действующего по вертикальной оси гироскопа, исключение баллистических девиаций путем настройки схемы управления на величину периода, отвечающего условию невозмущаемости, трудно выполнимо.
Одна из причин, затрудняющих реализацию найденного условия, заключается в том, что для получения больших периодов к гироскопу должны прикладываться весьма малые управляющие моменты, величины которых меньше или соизмеримы с возникающими моментами, имеющими место из-за статических ошибок следящих систем и нелинейности их звеньев.
В гирокомпасе с электромагнитным управлением использован более простой способ устранения баллистических девиаций. Для этого маятник индикатора горизонта сильно задемпфирован, а углы его отклонения от равновесного положения ограничены специальными упорами до относительно малой величины. Кроме того, чтобы снизить скорость баллистического перемещения гироскопа за время действия ускорения, период незатухающих колебаний в рабочем режиме гирокомпаса выбирается большим — до 120—180 мин.
Возможен еще один простой и, по-видимому, более эффективный способ устранения баллистических девиаций.
Если в индикаторе горизонта предусмотреть устройство, которое автоматически отключало бы сигнал индикатора горизонта от схемы управления гироскопом, когда маятник под действием ускорения достигает одного из упоров, то гироскоп вместо прецессирования с малой скоростью во время действия ускорения становится свободным. Можно ожидать, что в этом случае отклонение гироскопа за время маневрирования будет меньшим, чем при первом способе компенсации. Следует заметить, что в обоих случаях при маневрировании корректирующие моменты остаются приложенными к гироскопу.
Эффективным способом устранения баллистических девиаций для гирокомпасов с электромагнитным управлением является способ компенсации силы инерции, воздействующей на маятник индикатора горизонта при наличии линейных ускорений.
Выражение полной силы, которая должна быть приложена к маятнику индикатора горизонта для компенсации баллистических девиаций гирокомпаса, создаваемых изменением скорости и курса, можно записать в виде
F = mм [( dV /dt) cosK + V(dK /dt)sink] , (1. 18)
где F -сила;
mм –масса маятника;
K –курс;
V –скорость судна.
В качестве устройства для компенсации силы инерции, действующей на маятник, в индикаторе горизонта можно установить электромагнитный датчик момента, на который подается сигнал,. пропорциональный силе F.
Можно представить схему электромеханического прибора, решающего зависимость (1.18) и вырабатывающего нужный сигнал по автоматически вводимым значениям скорости и курса.
Чтобы не усложнять конструкцию индикатора горизонта, можно полученный сигнал коррекции суммировать в противофазе с сигналом, снимаемым с индикатора горизонта, предварительно» пропустив сигнал коррекции через фильтр с постоянной времени,. равной постоянной времени индикатора горизонта. Такое решение наиболее целесообразно для описываемой схемы.
Приведенный способ компенсации баллистических девиаций предпочтительнее, чем настройка незатухающих колебаний гирокомпаса на период невозмущаемости по следующим соображениям.
Теоретически такую коррекцию можно осуществить для любого типа маневрирования судна независимо от скорости. При этом период незатухающих колебаний может быть выбран в принципе любым, и, кроме того, нет необходимости менять параметры гирокомпаса в зависимости от широты. Описанный способ компенсации позволяет полностью компенсировать баллистические девиации, в том числе и девиацию затухания без выключения демпфирования на время маневра.
Интеркардинальная девиация. При движении судна в условиях качки следящая сфера гирокомпаса раскачивается вокруг-своей оси подвеса в такт с качкой под действием составляющей ускорения в плоскости Е—W.
Составляющая ускорения в плоскости N—S, воздействующая на маятник следящей сферы, меняя свое направление синхронно-с качкой, создает вертикальный момент, аналогично тому как это происходит у обычных маятниковых компасов, но в отличие от них в гирокомпасе с электромагнитным управлением этот момент сам по себе не вызывает интеркардинальной девиации.
Инерционные моменты, действующие на следящую сферу во время качки, приводят лишь к дополнительным динамическим нагрузкам на двигатели азимутальной и горизонтальной следящих систем, но не дают существенных ошибок в показаниях гирокомпаса.
Основная причина, определяющая появление интеркардинальной девиации у гирокомпаса с косвенным управлением, заключается в том, что составляющая ускорения в плоскости N—S действует и на маятник индикатора горизонта. Она вызывает появление сигнала, пропорционального ускорению и меняющего знак в такт с качкой. Этот сигнал поступает на двигатели, которые прикладывают к гироскопу через торсионы знакопеременные моменты. Поскольку одновременно происходит раскачивание следящей сферы, оси двигателей рассогласовываются с осями соответствующих торсионов на угол, примерно равный амплитуде качки. В результате, когда сигнал от индикатора горизонта поступает на двигатели, моменты, прикладываемые к гироскопу торсионами, создают две составляющие — горизонтальную и вертикальную.
Так как горизонтальные торсионы имеют жесткость, во много раз большую, чем вертикальные, то вертикальная составляющая моментов от горизонтальных торсионов по абсолютной величине значительно превосходит остальные вертикальные моменты. Она и образует постоянный вертикальный момент, вызывающий ин-геркардинальную девиацию гирокомпаса па качке. Как видно, механика появления интеркардинальной девиации у гирокомпасов с электромагнитным управлением иная, чем у обычных маятниковых гирокомпасов, но схема образования постоянного вертикального момента при качке по существу одинакова.
Величина интеркардинальной девиации, закон ее изменения и зависимость от параметров гирокомпаса и качки для гирокомпаса с электромагнитным управлением в принципе остаются такими же, как и для одногироскопных маятниковых компасов.
Из известных способов компенсации интеркардинальной девиации для гирокомпаса с электромагнитным управлением наиболее рациональным оказалось применение индикатора горизонта с сильно демпфированным маятником.
Введение в чувствительный маятниковый элемент вязкого трения позволяет осуществить сдвиг по фазе, близкий к 90°, между действующим ускорением и моментом, прикладываемым к гироскопу, в результате чего эффект влияния качки на гирокомпас сводится к минимуму.
Уравнение движения такого индикатора горизонта при воздействии на него горизонтального ускорения для малых углов можно .записать в виде
тм l2 q”+c q’+mм g lq= mм l a (1. 19)
где mм — массы маятника;
l — длина маятника;
q — угол отклонения маятника от вертикали;
с — коэффициент демпфирования;
а — горизонтальное линейное ускорение качки. Передаточную функцию индикатора горизонта, движение которого описывается уравнением (1.19), можно представить выражением
W(p)= q (p)/a (p)=1 / Tм2 p2 +t p + 1 , (1. 20)
где Tм=(l / g); t = c/ mм g l —постоянные времени индикатора горизонта.
Практически величина Tм во много раз меньше периода качки. Поэтому введя в индикатор горизонта сильное демпфирование, правомерно пренебречь членом передаточной функции, содержащим р2. Тогда коэффициент ослабления амплитуды колебаний маятника по сравнению с амплитудой колебаний динамической вертикали будет приближенно определяться формулой
k =1 /( t2 w2 +1)1/ 2 (1. 21)
Например, для индикатора горизонта с постоянной времени t =60 сек при качке с частотой (w = 1,2'/сек) ослабление выходного сигнала, снимаемого с индикатора горизонта, будет около 72. Если учесть еще и сдвиг фазы между колебаниями маятника и действующим ускорением, то уменьшение выходного сигнала, а следовательно, и интеркардинальной девиации гирокомпаса окажется более значительным.
Влияние индикатора горизонта с большой постоянной времени на собственные колебания гирокомпаса очень мало, поскольку постоянная времени составляет менее 1 % от величины периода колебаний гирокомпаса.
Поведение гирокомпаса с электромагнитным управлением на качке отличается от обычных маятниковых компасов одной существенной особенностью. В этом гирокомпасе, помимо постоянной составляющей по вертикальной оси от моментов, вызванных сигналами индикатора горизонта, при качке появляется постоянная составляющая на ту же ось от знакопеременных моментов, накладываемых на гиросферу горизонтальными торсионами вследствие динамических ошибок следящих систем. Эта погрешность, имеющая четвертной характер, зависит от жесткости горизонтальных торсионов и при больших динамических ошибках ее величина может достигнуть существенного значения.
Другая особенность заключается в характере карданной ошибки гирокомпаса. Эта ошибка вызвана тем, что в рассматриваемой конструкции одногироскопного курсоуказателя карданов подвес ЧЭ обеспечивает снятие отсчета курса в плоскости палубы, а не в плоскости горизонта.
Величина карданной ошибки определяется формулой
DK = К. - arctg [tg (Кг cosq /siny) - sinq tgy ] , (1. 22)
где Кг — курс в горизонтальной плоскости;
q — угол крена (бортовой качки);
y — угол дифферента (килевой качки).
Карданная ошибка при следовании судна курсами 0, 90, 180 и 270° равна нулю и достигает максимума на промежуточных курсах 45, 135, 225 и 315°. Несмотря на то, что даже при симметричной качке возникает постоянная карданная ошибка, практически при использовании курсоуказателя для целей судовождения ею можно пренебречь. При правильной бортовой качке с амплитудой в 10° и следовании промежуточными курсами средняя величина карданной ошибки не превышает 0°,3.
Работа курсоуказателя в режиме гироазимута.
Для работы курсоуказателя в режиме гироазимута необходимо, чтобы ось кинетического момента гиросферы удерживалась в горизонте, а по обеим осям прецессии гиросферы были приложены корректирующие моменты для компенсации отклонения гиросферы за счет суточного вращения Земли и собственного движения объекта. В гирокурсоуказателе с электромагнитным управлением для осуществления режима гироазимута достаточно отключить маятниковый момент, пропорциональный сигналу индикатора горизонта, на горизонтальной оси прецессии гиросферы, сохранив при этом демпфирующий момент от индикатора горизонта на вертикальной оси для удержания главной оси гироскопа в горизонте. Необходимо также сохранить корректирующие моменты по обеим осям прецессии. В этом случае равенства (1.12), определяющие зависимости моментов от сигналов управления и коррекции, примут
(b -bc) = ex ; (a -ac) = m n b + ez (1. 23)
Полагая, что корректирующие сигналы ex и ez определяются, как и прежде, формулами (1.14) и, подставляя выражения (1.23) в уравнения (1.1), найдем частные решения системы (1.1) и (1.3) в виде:
a* = VN / ( Ru cosj +VE + CB R / H); ac*=0; .
bc*=H (u sinj + VE tgj/ R); b*=0. (1. 24)
Формулы (1.24), определяющие положение равновесия ЧЭ прибора в режиме гироазимута, тождественны формулам (1.15), определяющим положение равновесия ЧЭ в режиме гирокомпаса. Это свидетельствует о том, что при движении объекта в момент перехода из режима гирокомпаса в режим гироазимута ЧЭ никаких возмущений не получает и остается в прежнем положении, которое он занимал, работая в режиме гирокомпаса. Следовательно, в режиме гироазимута курсоуказатель сохраняет направление меридиана, выработанное в режиме гирокомпаса, естественно, с накапливающейся во времени ошибкой, которая определяется присущей данному гироскопу скоростью дрейфа.
При обратном переходе из режима гироазимута в режим гирокомпаса курсоуказатель в начальный момент будет иметь некоторую девиацию, так как за время работы в режиме гнроазимута гироскоп вследствие собственного ухода отклонится от меридиана. Затем, совершая затухающие колебания, гирокомпас придет в положение равновесия.
Следует отнести к достоинствам курсоуказателя с электромагнитным управлением то обстоятельство, что при переходе из одного режима в другой не требуется изменять корректирующие сигналы, тем более, что благодаря вводу в схему управления такого вида коррекции ЧЭ находится вблизи меридиана практически в обоих режимах работы прибора.
Основной погрешностью гироазимута является собственный дрейф гироскопа. Гирокурсоуказатель с косвенным управлением позволяет уменьшать эту погрешность теоретически до величины нестабильности скорости ухода гироскопа. Для этого достаточно ввести в схему управления сигнал, напряжение которого пропорционально постоянной составляющей скорости ухода гироскопа, и просуммировать с сигналом датчиков угла гироскопа в соответствующих масштабе и фазе как это делается при вводе корректирующих сигналов. В результате этого к гироскопу по горизонтальной оси прецессии окажется приложенным момент, который скомпенсирует постоянную составляющую скорости ухода гироскопа.
При воздействии на курсоуказатель, работающий в режиме гироазимута, ускорений качки, гироазимут имеет дополнительный систематический уход. Этот уход возникает из-за появления постоянной составляющей момента по горизонтальной оси прецессии гироскопа. Знакопеременные сигналы индикатора горизонта вызывают меняющийся в такт качке момент, накладываемый тор-сионами на гиросферу вокруг ее вертикальной оси. Благодаря одновременному раскачиванию следящей сферы в такт качке вокруг оси ее подвеса (по углу g) проекция знакопеременного момента дает постоянную составляющую на горизонтальную ось прецессии, которая и вызывает систематический уход гироазимута на качке.
Анализ факторов, влияющих на эту погрешность гироазимута, показывает, что меры, принятые для уменьшения погрешности гирокомпаса на качке, а именно, применение индикатора горизонта с большой постоянной времени и гидравлического демпфера на оси подвеса следящей сферы, существенно уменьшают погрешность гироазимута на качке.
Что касается влияния ускорений от маневрирования на нестабильность ухода гироазимута, то теоретически оно зависит от времени действия ускорений и мало по величине. Практически в силу тех же технических решений, которые компенсируют влияние ускорений на качке, это влияние не имеет существенного значения.
На основании краткого анализа изложенного принципа действия двухрежимного курсоуказателя с электромагнитным управлением можно сделать некоторые выводы в отношении его преимуществ перед обычными маятниковыми гирокомпасами:
конструкция торсионно-жидкостного подвеса ЧЭ, который представляет собой астатический поплавковый гироскоп, обеспечивает гидростатическую разгрузку подвеса и отсутствие сухого трения в его осях, что уменьшает возмущения, вызываемые силами инерции;
электрическая схема управления параметрами гирокомпаса (периодом, степенью демпфирования) и режимами работы прибора позволяет, переключая электрические цепи, изменять параметры гирокомпаса и режимы работы в зависимости от условий плавания и эксплуатационных требований;
в гирокомпасе с электрической схемой управления сравнительно простыми средствами обеспечивается полная компенсация скоростной девиации для больших скоростей движения судна при условии ввода в прибор данных скорости и широты с достаточной точностью. При этом методе компенсации скоростной девиации существенно, что сам гироскоп практически все время остается в меридиане;
электрическая схема управления создает практическую возможность полной компенсации баллистических девиаций гирокомпаса пр-и маневрировании судна. Для этого может использоваться индикатор горизонта с коррекционньш датчиком момента и несложный электромеханический прибор, вырабатывающий нужный сигнал коррекции. При указанном способе компенсации баллистических девиаций нет необходимости изменять параметры гирокомпаса в зависимости от широты и выключать демпфирование на время действия ускорений;
конструкция и схема двухрежимного гироскопического курсоуказателя обеспечивает его работу в режиме гирокомпаса или гироазимута, а также в режиме гиромагнитного компаса. Это расширяет сферу применения приборов такого типа.
Основной прибор ВГ-1А.
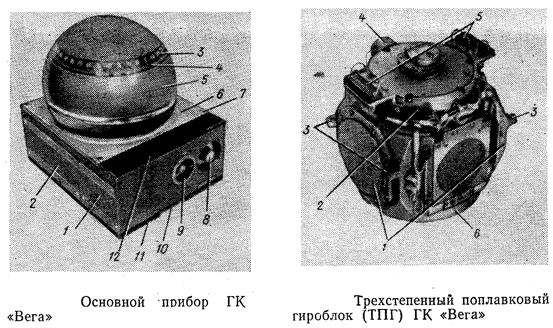 |
Функцию гироскопического указателя меридиана выполняет прибор ВГ-1А (рис. 4). В корпусе прямоугольной формы 6 со сферическим колпаком 5 размещены трехстепенный поплавковый гироблок (ТПГ), элементы следящих систем стабилизации, детали схем терморегулирования и управления.
ТПГ выполнен в виде герметичной камеры (следящей сферы), заполненной специальной вязкой жидкостью (рис. 5). В этой камере с помощью вертикальных и горизонтальных тор-сионов подвешен поплавок с гиромотором. На гироблоке по линии N—3 установлены роторы индукционных датчиков углов / (ДУ) рассогласования гиросферы со следящей сферой (статоры ДУ находятся на гиросфере). Сверху и снизу на камере в кольцевых пазах 2 установлены дополнительные обогреватели для интенсивного разогрева жидкости при пуске компаса. Их включением управляет термореле 4 (Т/--003). На кронштейнах к крышке гироблока приспособлены штепсельные разъемы 5 для подачи питания на гироблок и снятия информации с датчиков углов. Снизу к камере подвешен груз 6 для придания маятниковости гироблоку в кардановом подвесе. Гироблок четырьмя приливами 3 с отверстиями для крепежных винтов укладывается на установочное кольцо. С западной стороны камеры на установочном кольце находится индикатор горизонта (ИГ), с северной—пузырьковый уровень для визуального конт- роля за балансировкой установочного кольца при сборке (уровень находится под колпаком). На двух цапфах, параллельных главной оси гироблока, установочное кольцо укладывается в подшипники на внутреннем кардановом кольце 6 (рис. 8). Для гашения колебаний гироблока относительно оси подвеса установочного кольца предусмотрен дисковый масляный демпфер.
С южной стороны в месте крепления цапфы в кардановом подвесе вмонтирован плоский вращающийся трансформатор (ПТ-003). Статор его неподвижен, а роторная обмотка связана с цапфой и поворачивается вместе с ней. Этот вращающийся трансформатор называют координатным преобразователем. Его включение в схему вызвано тем, что при повороте гироблока вокруг оси XX на угол ^ под воздействием внешних возмущающих сил в связи с маятниковостью гироблока и отсутствием стабилизации относительно главной оси происходит взаимное влияние горизонтной и азимутальной следящих систем (принцип работы следящих систем рассмотрен в § 18). Действительно, при выходе гироблока из отвесного положения моменты Ьгс и Ьтс, создаваемые торсионами, оказываются повернутыми в плоскости У02. на угол О. В таком случае горизонтальный и вертикальный моменты будут состоять из суммы проекций указанных моментов на эти оси. В результате нормальная величина корректирующих моментов искажается и в показаниях прибора возникают погрешности. Для исключения взаимного влияния следящих систем в схему управления подаются соответствующие сигналы, снимаемые с ротора преобразователя координат.
Внутреннее карданово кольцо 6 с гироблоком с помощью цапф и подшипников укладывается на наружное карданово кольцо, выполненное в виде вилки 7, ось которой установлена в подшипнике на основании 10 и может разворачиваться вокруг оси 2.2. на 360°. Сверху к вилке крепится шкала курсов 8 с ценой деления 1°. .
Ось вилки через редуктор связана с азимутальным двигателем следящей системы стабилизации / и двумя синусно-коси-нусными вращающимися трансформаторами 2 и 11 (СКВТ), включенными в схему трансляции курса (на транспортных и промысловых судах задействован только один СКВТ). На ось вилки насажен токосъемник 13 с серебряными кольцами и стальными щетками, закрываемый пластмассовой крышкой.
На горизонтальном (внутреннем) кардановом кольце укреплен зубчатый сектор, который посредством механической передачи связан с горизонтным двигателем следящей системы ста билизации, установленным в нижней части вилки. При вращении этого двигателя камера гироблока разворачивается вокруг оси УУ.
Рабочая температура (75 °С) в приборе поддерживается кольцевым нагревателем 5, прикрепленным к основанию четырьмя стойками 9. Управляет его работой термореле 3 (7У002), размещенное на основании 10. Рядом установлен биметаллический термодатчик 4 (ГгООО), включающий аварийную сигнальную систему при достижении температурой жидкости верхнего предела (80°С).
На основании расположены три штепсельных разъема (два со стороны носа). Для работы с гиросекцией вне корпуса прибора установлены четыре опорные ножки 12. Гиросекция своим основанием укладывается в корпус прибора.
Верхняя часть колпака 5 сделана из органического стекла, полярная шапка закрашена изнутри, оставлена прозрачной лишь кольцевая полоска напротив курсовой шкалы 3 (рис.65). Курсовая черта—красная полоска 4—нанесена на прозрачном кольце со стороны кормы. Колпак привинчивается к корпусу прибора четырьмя невыпадающими винтами 7.
В корпусе 6 установлены усилители следящих систем: слева азимутальный 2, справа горизонтный, рядом с усилителями под квадратными крышками размещены реле схемы управления 1 (слева) и регуляторы «дрейф» и «поправка».
На верхней панели 12 расположены четыре световых табло:
«пуск», «подготовка», «гирокомпас» и «гироазимут»; на передней—переключатель 9 («подготовка»—«работа»} и ручка 8 регулировки «скорости приведения» (ускоренного в меридиан).
На задней стенке имеются три "штепсельных разъема, из них верхний предназначен для подключения контрольных приборов при регулировке приборов, через нижние осуществляется связь основного прибора с другими.
Корпус прибора на четырех амортизаторах крепится к установочной плите 11с тремя овальными отверстиями для крепежных шпилек (два с задней стороны и одно с передней), поэтому плиту (вместе с корпусом) можно поворачивать в пределах ±5° для устранения постоянной поправки в показаниях гирокомпаса. Для контроля за углом разворота прибора на установочной плите с задней стороны нанесена шкала 10 с ценой деления 0,5°.
